GEOBIA Achievements and Spatial Opportunities in the Era of Big Earth Observation Data




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Spatial Image Analysis
1.1. Space First … or Never?
1.2. From Case-Based to Big EO Data Solutions
2. Summary of Computer Vision Achievements
2.1. The Vision Aspect in CV
2.2. Perceptual Evidence and Algorithmic Solution
2.3. Spatial Sensitive CNNs
3. GEOBIA: Bridging Remote Sensing and GIS
3.1. Horizontal and Vertical Properties
3.2. Spatial Autocorrelation vs. the Ignorance of Space
3.3. From Image to Information Infrastrucuture
4. Outlook: GEOBIA Opportunities in the Era of Big Earth Data
- ▪
- EO image enhancement: The harmonization of image data values is required at the radiometric and semantic levels of analysis. For example, ESA defines as EO Level 2 information product a single-date multi-spectral (MS) image corrected for atmospheric, adjacency and topographic effects, stacked with its data-derived scene classification map (SCM), whose legend includes quality layers, cloud, and cloud-shadow [83]. Thus far, except for an initial Level-2A pilot production for Sentinel-2 imagery, EO Level 2 products have not been systematically generated at the ground level (i.e., from the image distributor).
- ▪
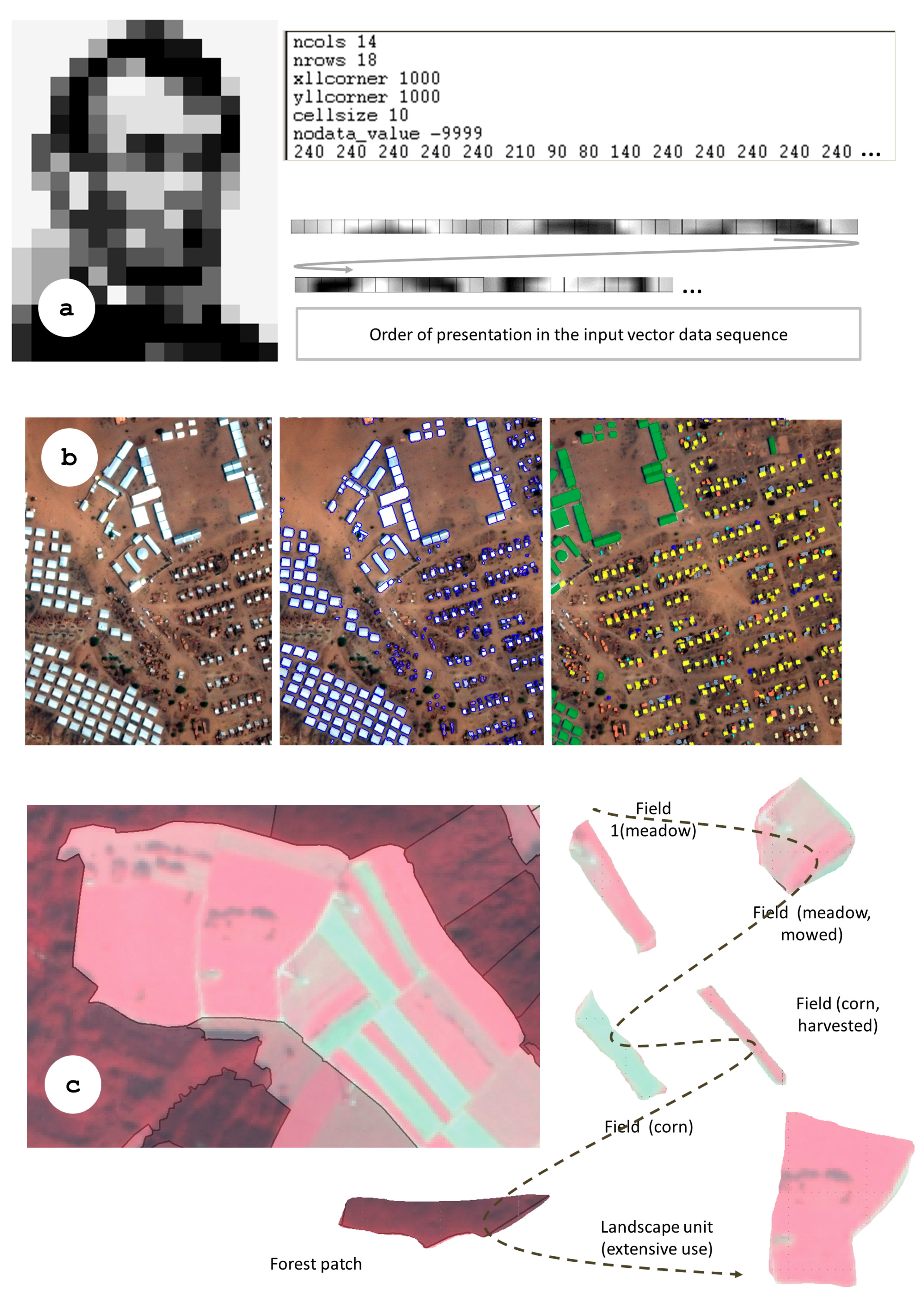
- EO image storage/analytics: EO big raster data storage and analytics are affected by ongoing limitations to tackle spatio-temporal information in vector format. Novel database management systems (i.e., data cubes), adopted from data warehouse technologies, allow for a more efficient storage and querying of multi-temporal data stacks and time series. By comparison, typical EO data cubes store data in a multi-dimensional data array with two or three spatial dimensions and one non-spatial dimension [84]. The data cube model, for example implemented by the Open Data Cube (ODC) Initiative or the EarthServer project using the (commercial) Rasdaman array database system [85], allows for new data retrieval and management solutions.
- ▪
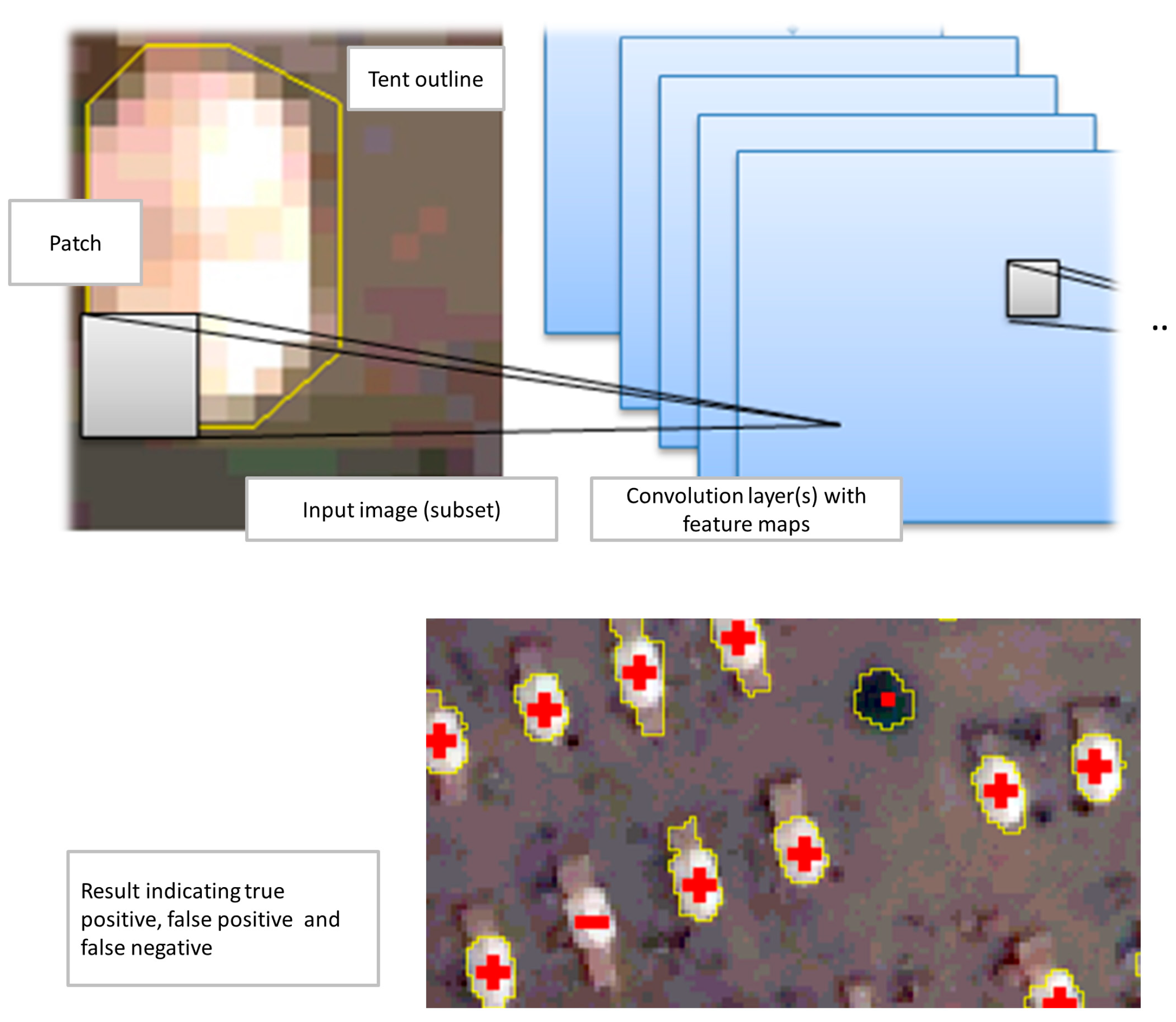
- Deep CV systems: To overcome existing limitations, deep (multi-scale) distributed CV systems (i.e., CNNs) are required that allow 2D topology-preserving and context-sensitive image-feature mapping with feedback loops, as an alternative to feedforward 1D image analysis, either pixel- or local window-based.
- ▪
- Hybrid inference: Hybrid (i.e., combined deductive/top-down and inductive/bottom-up) inference is poised to fully exploit scene content. All biological cognitive systems are hybrid inference systems where inductive/bottom-up/phenotypic learning-from-example mechanisms explore the neighbourhood of deductive/top-down/genotypic initial conditions in a solution space. On the contrary, inductive inference currently dominates CV solutions, such as CNNs where a priori knowledge is encoded by a static design.
- ▪
- Convergence of evidence: Structured CV system-of-systems design needs to be implemented based on a convergence of spatial and colour evidence. The well-known engineering principles of modularity, regularity, and hierarchy, typical of scalable systems [48] in agreement with the popular divide-and-conquer problem solving principle [86], are not satisfied by the relative opacity of ‘black box’ artificial neural networks (ANNs)—including CNNs.
- ▪
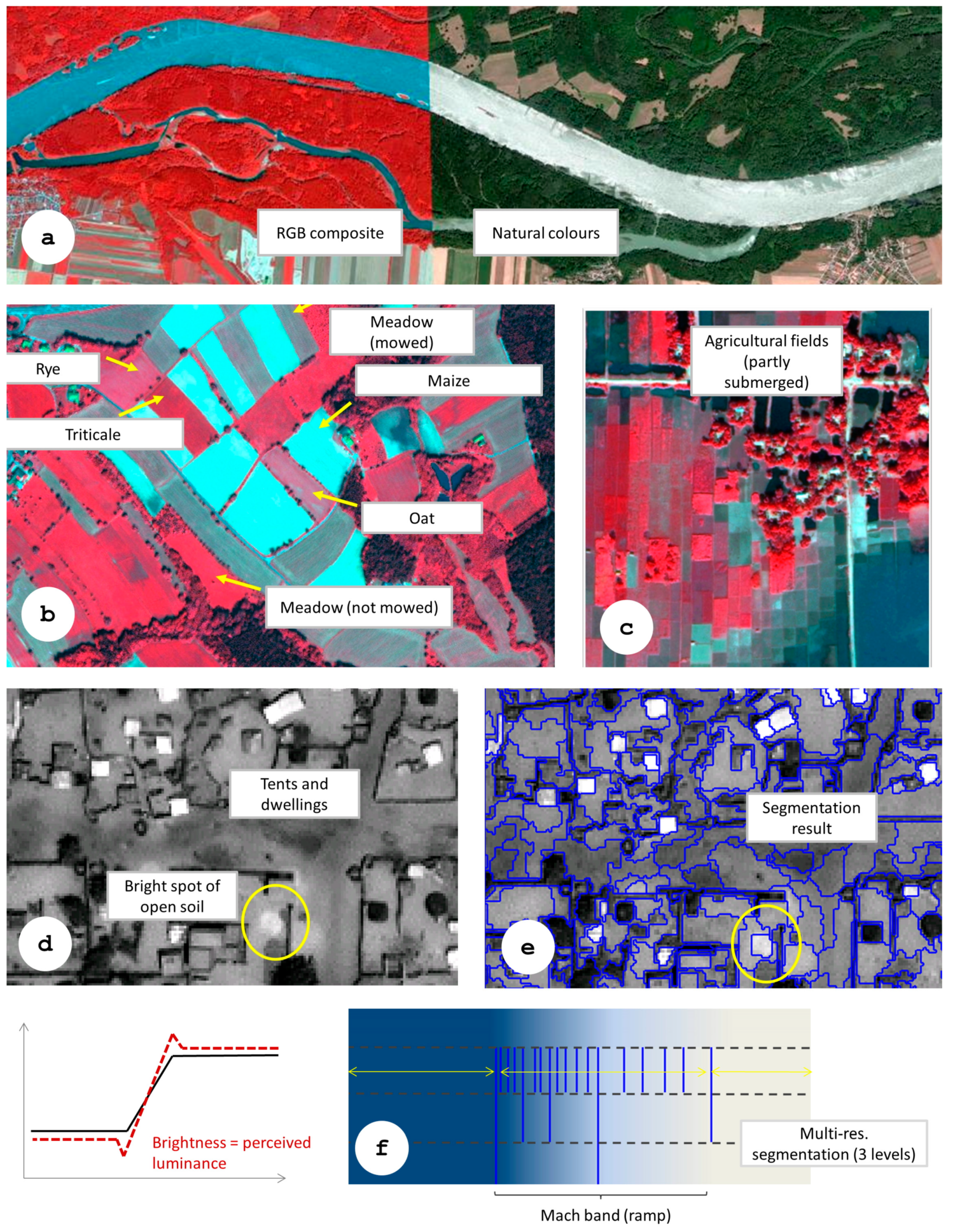
- Consistency with human perception: CV (including GEOBIA) needs to be fully consistent with human visual perception. This applies to the issue of perceived (conceptual) boundaries [2] along a gradient of changing patterns according to the principles of Gestalt theory [68], and extends, when benchmarking a CV system on (human) perceptual effects, such as the well-known Mach bands illusion where bright and dark bands are seen at small ramp edges.
- ▪
- Semantic content-based image retrieval (SCBIR): Semantic enrichments of databases or data cubes needed to extend and enhance the current search and query capabilities of large data archives, by content rather than (global) image statistics, e.g., “find all Sentinel-2 scenes, cloud free over flooded areas in the past three years” [87]. While text-based image retrieval is supported by CBIR prototypes, no SCBIR system currently exists in operational mode. Known as query by image content (QBIC) [88], prototypical implementations of CBIR systems take an image, image-object or multi-object examples as query and return from the image database a ranked set of images similar in content to the query. CBIR system prototypes support no semantic querying because they lack CV capabilities in operating mode. A necessary but not sufficient pre-condition to SCBIR is image understanding in operating mode; which is currently still just a concept.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
List of Acronyms
| 2, 3, 4D | 2, 3, 4-dimensional |
| AI | Artificial intelligence |
| ATKIS | Authoritative topographic-cartographic information systems |
| CNN | Convolutional neural networks |
| CV | Computer vision |
| EC | European Commission |
| EO | Earth observation |
| ESA | European Space Agency |
| ETRF | European terrestrial reference frame |
| FAO | Food and agriculture organization |
| (GE)OBIA | (Geographic) object-based image analysis |
| GEO(SS) | Group on Earth observation (system of systems) |
| GI(S) | Geographic information (systems) |
| GSD | Ground sampling distance |
| LCCS | Land cover classification system |
| NASA | North American Space Agency |
| NIR | Near infrared |
| ODC | Open data cube |
| RF | Random forest |
| RGB | Red, green, blue |
| RS | Remote sensing |
| SCM | Scene classification map |
| SDI | Spatial data infrastructure |
| SIAM | Satellite image automatic mapper |
| SLIC | Simple linear iterative clustering |
| SVM | Support vector machine |
| RPAS | Remotely piloted airborne systems |
| USGS | U.S. Geological Survey |
| VH(S)R | Very high (spatial) resolution |
References
- European Commission. COM(2016) 705 Final. Space Strategy for Europe; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- Lang, S. Object-based image analysis for remote sensing applications: Modeling reality—dealing with complexity. In Object-Based Image Analysis—Spatial Concepts for Knowledge-Driven Remote Sensing Applications; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Berlin, Germany, 2008; pp. 3–28. [Google Scholar]
- Iqbal, Q.; Aggarwal, J.K. Image retrieval via isotropic and anisotropic mappings. Pattern Recognit. 2002, 35, 2673–2686. [Google Scholar] [CrossRef]
- Murphy, G. Categories and Concepts. In Psychology; Biswas-Diener, R., Diener, E., Eds.; DEF Publishers: Champaign, IL, USA, 2014. [Google Scholar]
- Lang, S.; Tiede, D. Geospatial data integration in OBIA—implications of accuracy and validity. In Remote Sensing Handbook, Volume I—Land Resources: Monitoring, Modeling, and Mapping; Thenkabail, P., Ed.; Taylor & Francis: New York, NY, USA, 2015; Volume I, pp. 295–316. [Google Scholar]
- Marr, D. Vision; W.H. Freeman: New York, NY, USA, 1982. [Google Scholar]
- Tomlin, D.C. GIS and Cartographic Modeling; Prentice Hall: Upper Saddle River, NJ, USA, 1990. [Google Scholar]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Van der Meer, F.; Van der Werff, H.; Van Coillie, F.; et al. Geographic Object-based Image Analysis: A new paradigm in Remote Sensing and Geographic Information Science. J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Hay, G.J.; Castilla, G. Geographic object-based image analysis (GEOBIA): A new name for a new discipline. In Object-Based Image Analysis: Spatial Concepts for Knowledge-Driven Remote Sensing Applications; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Open Geospatial Consortium (OGC). OpenGIS® Implementation Standard for Geographic Information—Simple Feature Access—Part 1: Common Architecture. Available online: http://www.opengeospatial.org/standards/is (accessed on 5 May 2019).
- Hay, G.; Niemann, K.O. Visualizing 3-D Texture: A Three-Dimensional Structural Approach to Model Forest Texture. Can. J. Remote Sens. 1994, 20, 90–101. [Google Scholar]
- Cian, F.; Marconcini, M.; Ceccato, P. Normalized difference flood Index for rapid flood mapping: Taking advantage of EO big data. Remote Sens. Environ. 2018, 209, 712–730. [Google Scholar] [CrossRef]
- Camara, G.; Queiroz, G.; Vinhas, L.; Ferreira, K.; Cartaxo, R.; Simoes, R.; Llapa, E.; Assis, L.; Sanchez, A. The e-sensing architecture for big Earth observation data analysis. In Proceedings of the Conference on Big Data from Space (BIDS), Toulouse, France, 28–30 November 2017; pp. 48–51. [Google Scholar]
- Blaschke, T.; Lang, S.; Lorup, E.; Strobl, J.; Zeil, P. Object-oriented image processing in an integrated GIS/remote sensing environment and perspectives for environmental applications. Environ. Inf. Plan. Politics Public 2000, 2, 555–570. [Google Scholar]
- Wulder, M.A.; Coops, N.C. Make Earth observations open access: Freely available satellite imagery will improve science and environmental-monitoring products. Nature 2014, 513, 30. [Google Scholar] [CrossRef]
- Zeil, P.; Ourevitch, S.; Debien, A.; Pico, U. The Copernicus User Uptake—Copernicus Relays and Copernicus Academy. GI Forum J. Geogr. Inf. Sci. 2017, 253–259. [Google Scholar] [CrossRef]
- GEO. The Global Earth Observation System of Systems (GEOSS) 10-Year Implementation Plan, Adopted 16 February 2005; GEO: Brussels, Belgium, 2005. [Google Scholar]
- GEO-CEOS. A Quality Assurance Framework for Earth Observation, Version 4.0 [Group on Earth Observations/Committee on Earth Observation Satellites]; GEO: Brussels, Belgium, 2010. [Google Scholar]
- Guo, H. Big Earth data. A new frontier in Earth and information science. Big Earth Data 2017, 1, 4–20. [Google Scholar] [CrossRef]
- Yang, C.; Huang, Q.; Li, Z.; Liu, K.; Hu, F. Big data and cloud computing: Innovation opportunities and challenges. Int. J. Dig. Earth 2017, 10, 13–53. [Google Scholar] [CrossRef]
- Baraldi, A. Pre-processing, Classification and Semantic Querying of Large-Scale Earth Observation Spaceborne/Airborne/Terrestrial Image Databases: Process and Product Innovations; University of Naples Federico II: Naples, Italy, 2017. [Google Scholar]
- Lang, S.; Blaschke, T. Bridging remote sensing and GIS–What are the main supportive pillars? Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2006, XXXVIII-4/C42, 4–5. [Google Scholar]
- Object-Based Image Analysis: Spatial Concepts for Knowledge-Driven Remote Sensing Applications; Blaschke, T.; Lang, S.; Hay, G. (Eds.) Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Hay, G. Visualizing scale-domain manifolds: A multiscale geo-object-based approach. In Scale Issues in Remote Sensing; Weng, Q., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014. [Google Scholar]
- Hay, G.; Blaschke, T.; Marceau, D.J.; Bouchard, A. A comparison of three image-object methods for the multiscale analysis of landscape structure. J. Photogramm. Remote Sens. 2003, 1253, 1–19. [Google Scholar] [CrossRef]
- Capurro, R.; Hjørland, B. The concept of information. In Annual Review of Information Science and Technology; Cronin, B., Ed.; Information Today, Inc.: Medford, NJ, USA, 2003; Volume 37, pp. 343–411. [Google Scholar]
- Cherkassky, V.F.M. Learning from Data: Concepts, Theory, and Methods; Wiley: Hoboken, NJ, USA, 1998. [Google Scholar]
- Matsuyama, T.; Hwang, V.S. SIGMA—A Knowledge-Based Aerial Image Understanding System; Plenum Press: New York, NY, USA, 1990. [Google Scholar]
- Di Gregorio, A.; Jansen, L.J.M. Land Cover Classification System (LCCS): Classification Concepts and User Manual; Food and Agriculture Organization of the United Nations: Rome, Italy, 2005. [Google Scholar]
- Baraldi, A.; Lang, S.; Tiede, D.; Blaschke, T. Earth observation big data analytics in operating mode for GIScience applications—The (GE)OBIA acronym(s) reconsidered. In Proceedings of the GEOBIA 2018, Montpellier, France, 18–22 June 2018. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Haralick, R.M.; Shapiro, L. Image segmentation techniques. Comput. Graph. Image Process. 1985, 29, 100–132. [Google Scholar] [CrossRef]
- Horowitz, S.; Pavlidis, T. Picture segmentation by a directed split and merge procedure. In Proceedings of the 2nd International Joint Conference on Pattern Recognition, Prague, Czech Republic, 22–24 November 2019; pp. 424–433. [Google Scholar]
- Benz, U.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Pessoa, L. Mach bands: How many models are possible? Recent experimental findings and modeling attempts. Vis. Res. 1996, 36, 3205–3227. [Google Scholar] [CrossRef]
- Tiede, D.; Lang, S.; Albrecht, F.; Hölbling, D. Object-based class modeling for cadastre constrained delineation of geo-objects. Photogram. Eng. Remote Sens. 2010, 76, 193–202. [Google Scholar] [CrossRef]
- Principles of Neural Science; Kandel, E.; Schwartz, J.; Jessell, T.M.; Siegelbaum, S.A.; Hudspeth, A.J. (Eds.) Appleton and Lange: Norwalk, CT, USA, 1991; p. 1710. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Wang, H.; Wang, Y.; Zhang, Q.; Xiang, S.; Pan, C. Gated convolutional neural network for semantic segmentation in high-resolution images. Remote Sens. 2017, 9, 446. [Google Scholar] [CrossRef]
- Tsotsos, J.K. Analyzing vision at the complexity level. Behav. Brain Sci. 1990, 13, 423–469. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing—A review. IEEE Geoscie. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef]
- Blaschke, T.; Strobl, J. What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. Z. Geoinf. 2001, 14, 12–17. [Google Scholar]
- Hay, G.J.; Marceau, D.J.; Dubé, P.; Buchard, A. A multiscale framework for landscape analysis: Object-specific analysis and upscaling. Landsc. Ecol. 2001, 16, 471–490. [Google Scholar] [CrossRef]
- Hay, G.J.; Marceau, D.J. Multiscale Object-Specific Analysis (MOSA): An integrative approach for multiscale landscape analysis. In Remote Sensing and Digital Image Analysis: Including the Spatial Domain; De Jong, S., Van der Meer, F., Eds.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2004; Volume 5, pp. 71–92. [Google Scholar]
- Ghorbanzadeh, O.; Tiede, D.; Dabiri, Z.; Sudmanns, M.; Lang, S. Dwelling extraction in refugee camps using CNN—first experiences and lessons learnt. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2018, XLII, 161–168. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 435–444. [Google Scholar] [CrossRef] [PubMed]
- Belgiu, M.; Dragut, L. Random forest in remote sensing: A review of applications and future directions. J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Lipson, H. Principles of modularity, regularity, and hierarchy for scalable systems. J. Biol. Phys. Chem. 2007, 7, 125–128. [Google Scholar] [CrossRef] [Green Version]
- Marcus, G. Deep Learning. A Critical Appraisal. arXiv 2018, arXiv:1801.00631. [Google Scholar]
- Goodchild, M.J. Geographical information science. Int. J. Geogr. Inf. Sci. 1992, 6, 31–45. [Google Scholar] [CrossRef]
- Blaschke, T.; Lang, S. Object based image analysis for automated information extraction-a synthesis. In Proceedings of the Measuring the Earth II ASPRS Fall Conference, San Antonio, TX, USA, 6–10 November 2006; pp. 6–10. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Marshall, W. Proceedings of the The Mission to Create a Searchable Database of Earth’s Surface. Ted Talk. 11 April 2018. Available online: https://archive.org/details/WillMarshall_2018U (accessed on 11 October 2019).
- Baatz, M.; Schäpe, A. Multiresolution Segmentation: An Optimization Approach for High Quality Multi-Scale Image Segmentation; Strobl, J., Blaschke, T., Griesebner, G., Eds.; Wichmann Verlag: Salzburg, Austria, 2000. [Google Scholar]
- Grippa, T.; Lennert, M.; Beaumont, B.; Vanhuysse, S.; Stephenne, N.; Wolff, E. An open-source semi-automated processing chain for urban object-based classification. Remote Sens. 2017, 9, 358. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Lennert, M.; Vanhuysse, S.; Johnson, B.A.; Wolff, E. Scale matters: Spatially partitioned unsupervised segmentation parameter optimization for 62 large and heterogeneous satellite images. Remote Sens. 2018, 10, 1440. [Google Scholar] [CrossRef]
- Momsen, E.; Metz, M. Manual: I.segment. Available online: https://grass.osgeo.org/grass74/manuals/i.segment.html (accessed on 5 May 2019).
- Wiens, J. Spatial scaling in ecology. Funct. Ecol. 1989, 3, 385–397. [Google Scholar] [CrossRef]
- Turner, M.; Gardner, R.; O’Neill, R. Landscape Ecology in Theory and Practice. Pattern and Processes; Springer: New York, NY, USA, 2001. [Google Scholar]
- Wiens, J. The emerging role of patchiness in conservation biology. In The Ecological Basis of Conservation. Heterogeneity, Ecosystems and Biodiversity; Pickett, S., Ostfeld, R.S., Shachak, M., Likens, G.E., Eds.; Springer: New York, NY, USA, 1997; pp. 93–106. [Google Scholar]
- Forman, R.T.T.; Godron, M. Landscape Ecology; Wiley: New York, NY, USA, 1986. [Google Scholar]
- Wang, X.; Su, C.; Feng, C.; Zhang, X. Land use mapping based on composite regions in aerial images. Int. J. Remote Sens. 2018, 1–20. [Google Scholar] [CrossRef]
- Strasser, T.; Lang, S. Object-based class modelling for multi-scale riparian forest habitat mapping. Int. J. Appl. Earth Obs. Geoinf. 2015, 37, 29–37. [Google Scholar] [CrossRef]
- Goodchild, M.J.; May, Y.; Cova, T.J. Towards a general theory of geographic representation in GIS. Int. J. Geogr. Inf. Sci. 2007, 21, 239–260. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.M.; Hay, G.J.; Isabelle, C.; Hemachandaran, B. Transforming image-objects into multiscale fields: A GEOBIA approach to mitigate urban microclimatic variability within h-res thermal infrared airborne flight-lines. Remote Sens. 2014, 6, 9435–9457. [Google Scholar] [CrossRef]
- Castilla, G.; Hay, G.J. Image-objects and geo-objects. In Object-Based Image Analysis—Spatial Concepts for Knowledge-Driven Remote Sensing Applications; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 91–110. [Google Scholar]
- Snyder, W.E.; Qi, H. Fundamentals of Computer Vision; Cambridge University Press: Cambridge, UK, 2017; p. 390. [Google Scholar]
- Wertheimer, M. Drei Abhandlungen zur Gestalttheorie; Palm & Enke: Erlangen, Germany, 1925; p. 184. (In German) [Google Scholar]
- Tobler, W. A computer movie simulating urban growth in the Detroit region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Strahler, A.H. The factor of scale in remote sensing. Remote Sens. Environ. 1987, 21, 311–332. [Google Scholar] [CrossRef]
- Strahler, A.H.; Woodcock, C.E.; Smith, J.A. On the nature of models in remote sensing. Remote Sens. Environ. 1986, 20, 19. [Google Scholar] [CrossRef]
- Lippitt, C.D. Remote sensing from small unmanned platforms: A paradigm shift. Environ. Pract. 2015, 17, 2. [Google Scholar] [CrossRef]
- Lippitt, C.D.; Zhang, S. The impact of small unmanned airborne platforms on passive optical remote sensing: A conceptual perspective. Int. J. Remote Sens. 2018, 39, 15. [Google Scholar] [CrossRef]
- Tiede, D. A new geospatial overlay method for the analysis and visualization of spatial change patterns using object-oriented data modeling concept. Cartogr. Geogr. Inf. Sci. 2014, 41, 227–234. [Google Scholar] [CrossRef] [PubMed]
- Lang, S.; Kienberger, S.; Tiede, D.; Hagenlocher, M.; Pernkopf, L. Geons—domain-specific regionalization of space. Cartogr. Geogr. Inf. Sci. 2014, 41, 214–226. [Google Scholar] [CrossRef]
- Nagao, M.; Matsuyama, T. A Structural Analysis of Complex Aerial Photographs; Plenum Press: New York, NY, USA, 1980. [Google Scholar]
- IEEE. IEEE Standard Computer Dictionary: A Compilation of IEEE Standard Computer Glossaries; IEEE: New York, NY, USA, 1990. [Google Scholar]
- Griffith, D.; Hay, G.J. Integrating GEOBIA, machine learning, and volunteered geographiciInformation to map vegetation over rooftops. ISPRS Int. J. Geo-Inf. 2018, 7, 462. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Lang, S.; Csillik, O. ETRF grid-constrained superpixels generation in urban areas using multi-sensor very high resolution imagery. GI Forum—J. Geogr. Inf. Sci. 2017, 5, 244–252. [Google Scholar]
- Baraldi, A. Satellite Image Automatic Mapper™ (SIAM™). A turnkey software button for automatic near-real-time multi-sensor multi-resolution spectral rule-based preliminary classification of spaceborne multi-spectral images. In Recent Patents on Space Technology; NASA Langley Research Center: Hampton, VA, USA, 2011; pp. 81–106. [Google Scholar]
- Baraldi, A.; Boschetti, L. Operational automatic remote sensing image understanding systems: Beyond Geographic Object-Based and Object-Oriented Image Analysis (GEOBIA/GEOOIA). Part 1: Introduction. Remote Sens. 2012, 4, 2694–2735. [Google Scholar] [CrossRef]
- Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR) and VEGA Technologies. Sentinel-2 MSI—Level 2A Products Algorithm Theoretical Basis Document; European Space Agency: Paris, France, 2011. [Google Scholar]
- Sudmanns, M.; Lang, S.; Tiede, D. Big Earth data: From data to information. GI Forum J. Geog. Inf. Sci. 2018, 2018, 184–193. [Google Scholar] [CrossRef]
- Baumann, P.; Mazzetti, P.; Ungar, J.; Barbera, R.; Barboni, D.; Beccati, A.; Bigagli, L.; Boldrini, E.; Bruno, R.; Calanducci, A.; et al. Big data analytics for earth sciences. The EarthServer approach. Int. J. Dig. Earth 2016, 1, 3–29. [Google Scholar] [CrossRef]
- Bishop, C.M. Neural Networks for Pattern Recognition; Clarendon: Oxford, UK, 1995. [Google Scholar]
- Tiede, D.; Baraldi, A.; Sudmanns, M.; Belgiu, M.; Lang, S. Architecture and prototypical implementation of a semantic querying system for big Earth observation image bases. Eur. J. Remote Sens. 2017, 50, 452–463. [Google Scholar] [CrossRef]
- Tyagi, V. Content-Based Image Retrieval: Ideas, Influences, and Current Trends; Springer: Singapore, 2017. [Google Scholar]
- Augustin, H.; Sudmanns, M.; Tiede, D.; Lang, S.; Baraldi, A. Semantic Earth observation data cubes. Data 2019, 4, 102. [Google Scholar] [CrossRef]
- Bostrom, N. Superintelligence—Paths, Dangers, Strategies; Oxford University Press: Oxford, UK, 2014. [Google Scholar]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lang, S.; Hay, G.J.; Baraldi, A.; Tiede, D.; Blaschke, T. GEOBIA Achievements and Spatial Opportunities in the Era of Big Earth Observation Data. ISPRS Int. J. Geo-Inf. 2019, 8, 474. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8110474
Lang S, Hay GJ, Baraldi A, Tiede D, Blaschke T. GEOBIA Achievements and Spatial Opportunities in the Era of Big Earth Observation Data. ISPRS International Journal of Geo-Information. 2019; 8(11):474. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8110474
Chicago/Turabian StyleLang, Stefan, Geoffrey J. Hay, Andrea Baraldi, Dirk Tiede, and Thomas Blaschke. 2019. "GEOBIA Achievements and Spatial Opportunities in the Era of Big Earth Observation Data" ISPRS International Journal of Geo-Information 8, no. 11: 474. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8110474