Soil Salinity Mapping Using SAR Sentinel-1 Data and Advanced Machine Learning Algorithms: A Case Study at Ben Tre Province of the Mekong River Delta (Vietnam)

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Material and Methods
2.1. Description of the Study Area
2.2. Data Used
2.2.1. Soil Sample Collection and Processing
2.2.2. Sentinel-1 SAR Data
2.3. Machine Learning Algorithms Used
2.3.1. Neural Networks
2.3.2. Gaussian Process
2.3.3. Support Vector Regression
2.3.4. Random Forests
3. Propose Methodology Used
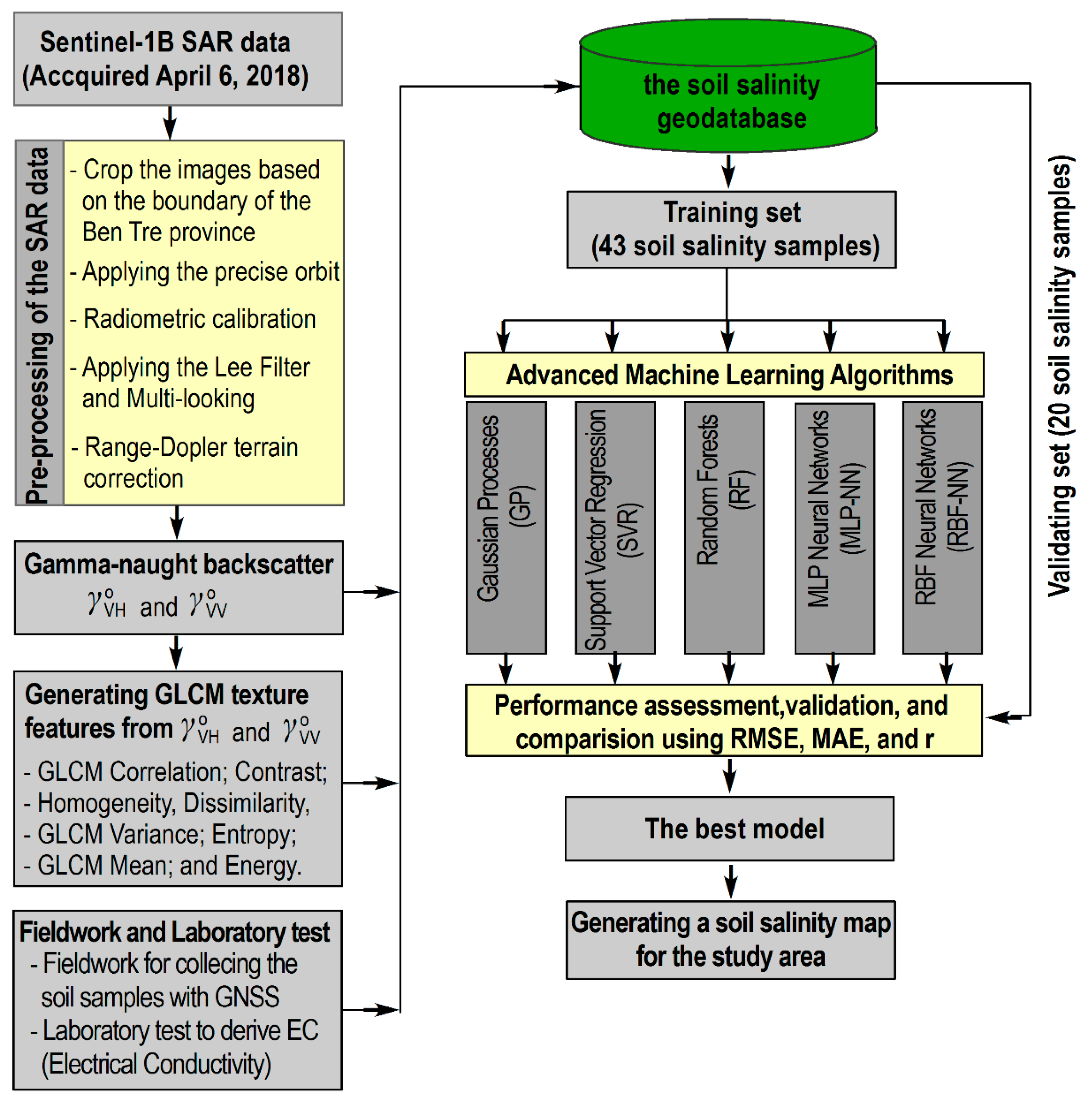
3.1. Preprocessing of the Sentinel-1 SAR Data
3.2. Soil Salinity Geodatabase, the Training Set, and the Validation Set
3.3. Feature Selection
3.4. Model Configurating and Training
3.5. Performance Assessment
3.6. Final Trained Model and Generating Soil Salinity Maps
4. Results
4.1. Variable Importance Assessment
4.2. Model Training and Their Performances
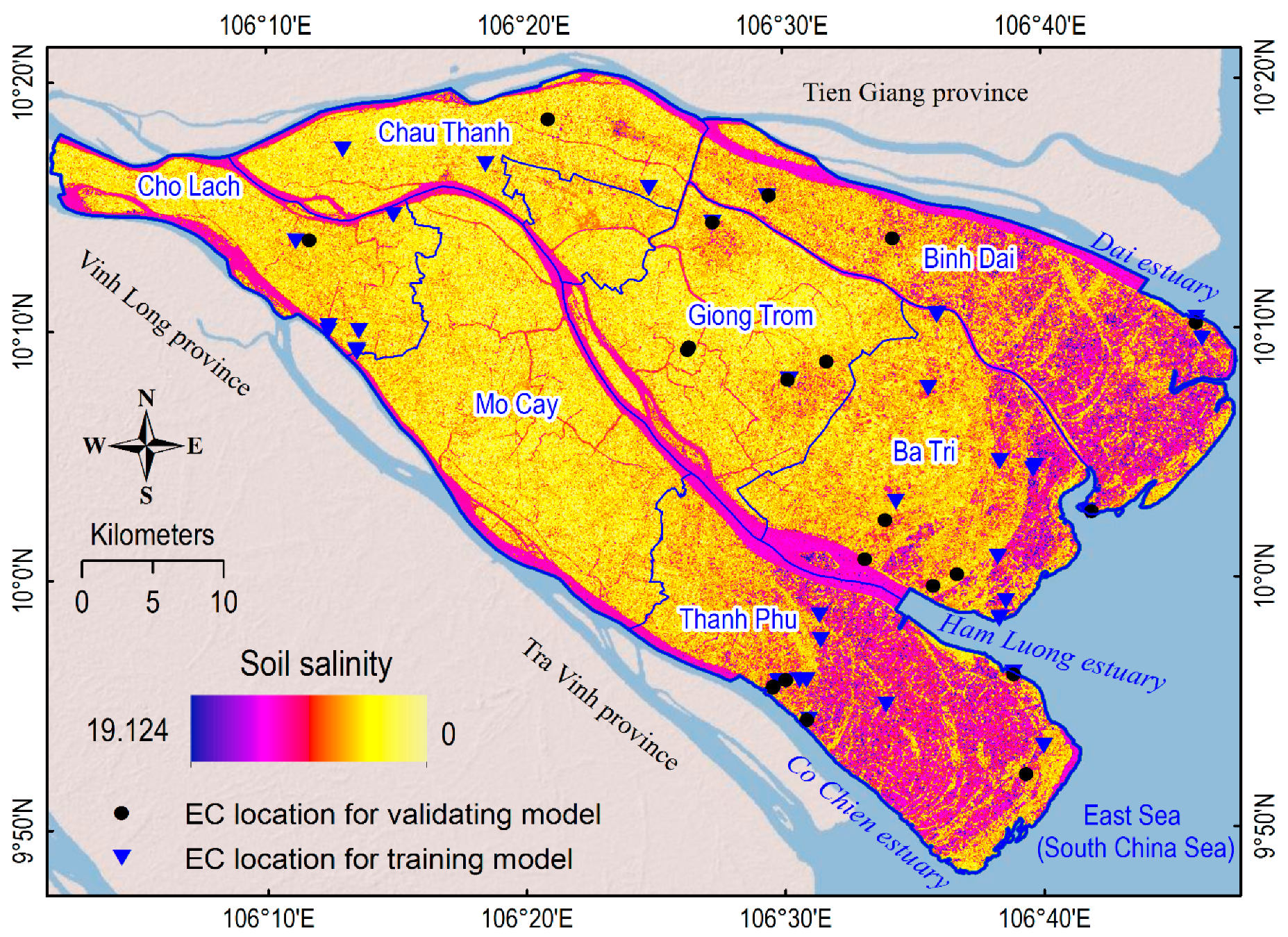
4.3. Soil Salinity Map
5. Discussion
- Overall, it is still difficult to establish accurately relationships between the soil salinity and radar signals though several attempts have been carried out [22]. The result in this research showed that the direct correlation of each of the radar bands ( and ) to the soil salinity is low indicating that empirical model of soil salinity using single radar is not feasible and this finding is in agreement with Jiang, Rusuli, Amuti, and He [31]. Therefore, combination of various factors is suggested to derive more accuracy models. As a result, 16 texture features derived from the two bands, and were considered.
- Feature selection was carried out for the 18 input features using RF and the permutation-based MSE reduction value of them varies from 27.26 to 135.33. This indicates that the 18 input features offer certain predictive values to the soil salinity. Further tests were carried out by removing features with low permutation-based MSE reduction values, and then, checking if with the reducing the feature set, the performance of the five regression models may be improved; however, no performance improvement was found. Therefore, it could be concluded that all the incorporated features used for modeling are appropriate and suitable for soil salinity modeling with machine learning methods.
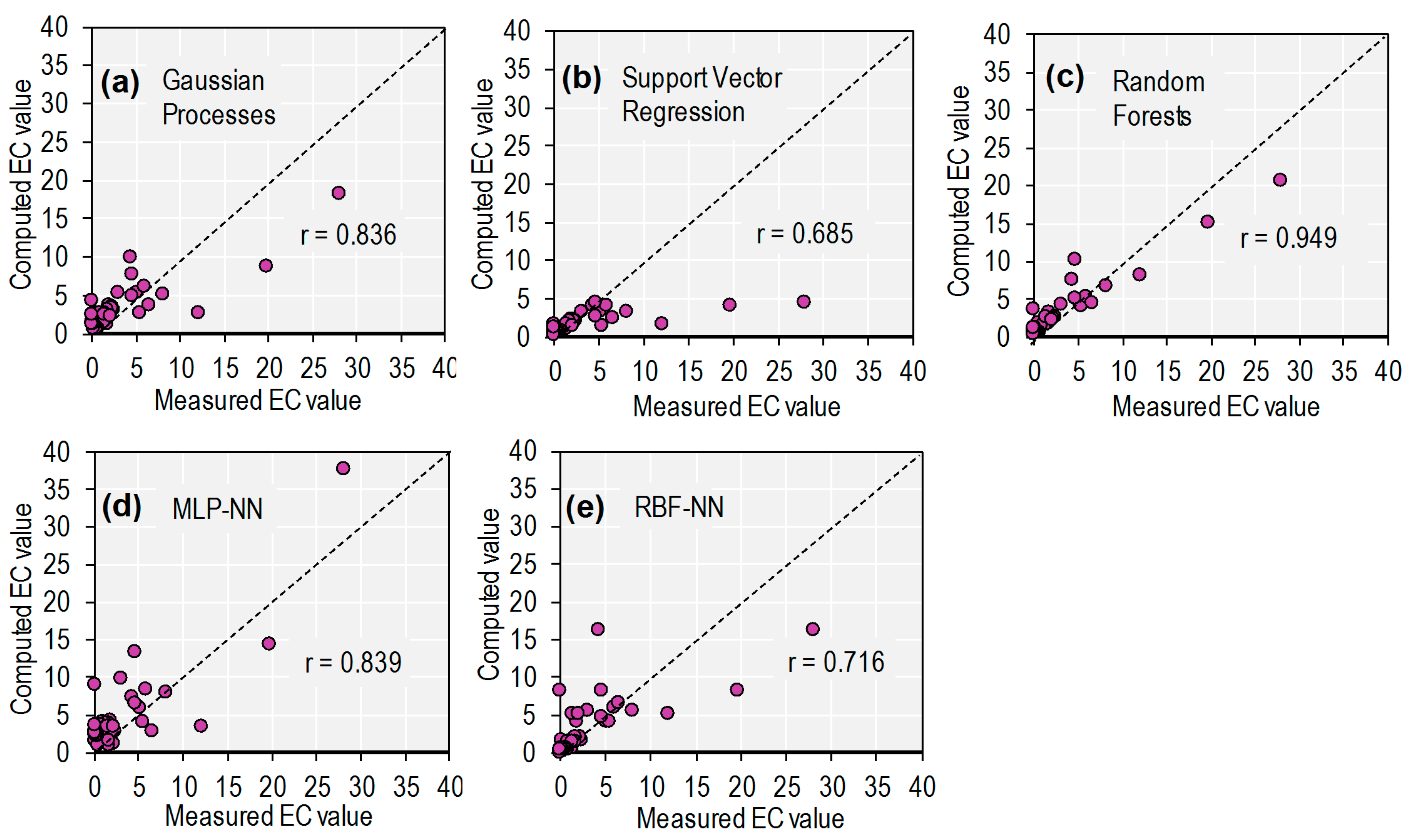
- Performance of the five regression models (the MLP-NN, the RBF-NN, the GP, the SVR, and the RF) used in this study continues confirming that soil salinity mapping is dependent on methods and techniques used [22,31]. Among the five models, the GP with RBF kernel function shows the most accuracy (r = 0.808, RMSE = 2.885, and MAE = 1.897). Although the RBF-NN model has lower MAE (1.586) and RMSE (2.732) compared to the GP model; however, correlation coefficient (r = 0.772) of the RBF-NN model is clear lower than that of the GP model. Therefore, GP is a powerful tool, which should be used for soil salinity mapping. The other three models (the MLP-NN, the SVR, and the RF) provide poorly prediction performance though they fit quit well with the training data, indicating that these models exist some degrees of over-fitting. This is because this research has a relatively small number of samples. In addition, both the training and validating set exist samples with extremely high EC values, which are difficult for these models to learn and predict.
- Evaluation of the predicted salinity values, which were obtained from the MLP-NN and the RBF-NN, reveals that the RBF-NN model has better prediction performance comparing to the MLP-NN. In RBF-NN model, the best setting achieved by using 18 as input neuron and 21 as number of clusters. In other side, the MLP-NN reach to EC map by incorporating 18 as input neuron and 6 as hidden neurons with the r = 0.624 and the lowest RMSE of 3.450 (when using all features). Nevertheless, both MLP-NN and RBF-NN provided poorly accuracy results in this research; therefore, newer neural network structures i.e., deep learning neural networks should be investigated.
- For the SVR model, this model had difficulties in learning with extremely high values of EC (three samples with EC values >12 in the training set). In other words, these samples caused a low degree-of-fit of the model. Consequently, the SVR model lacks sensitivities to samples with high EC values in the validating set. More specifically, three samples with EC values >7.9 were predicted as being below 4. In addition, the performance of the SVR model is influenced by its three parameters (C, σ, and nu) and although the grid search algorithm was used to determine the best values for the three parameters; however, it is difficult to conclude that these are the optimal values. Therefore, new machine learning optimization algorithms should be considered to find the optimized values for the three parameters.
- Regarding the RF model, although this model showed excellent goodness-of-fit, but it provided lowest prediction result. This is due to the natural limitation of this algorithm which usually predicted poor results then values in the validating set are outside those in the training sets that the RF was used to trained [76].
- Overall, the result in this research shows that the incorporating machine learning methods and the Sentinel-1 radar imagery for produce soil EC map with good accuracy is viable. Now, it is possible to estimate salinity for each 10 m × 10 m area at very short intervals of about 6 days. This represents the Radar remotely sensed data as a useful tool for land management studies and soil reclamation programs.
6. Conclusions
- Although the optical remote sensing images, i.e., Landsat 8 OLI and Sentinel-2 have proven their efficiency in the soil salinity mapping on other areas; however, they are not suitable for the tropical province of Ben Tre due to cloud cover problems.
- Sentinel-1 SAR data, which are not affected by weather conditions, have enough capability to separate saline soils directly by using machine learning methods. It can be concluded that it is conceivable to map soil salinity at short intervals of about 6 days for each 10 m × 10 m area, using the potential of the Sentinel-1 satellite image data and the GP method. This confirms remote sensing as a powerful technology for salinity mapping.
- Texture features derived from the two bands, and and Random Forest with Permutation-based MSE reduction are useful for soil salinity modeling.
- Incorporating the potential of full polarized SAR images in different frequency bands (P, L, C, and X) and applying various target decomposition methods to SAR image data for generating salinity models is recommended for future studies.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Metternicht, G.; Zinck, A. Remote Sensing of Soil Salinization: Impact on Land Management; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Metternicht, G.I.; Zinck, J.A. Remote sensing of soil salinity: Potentials and constraints. Remote Sens. Environ. 2003, 85, 1–20. [Google Scholar] [CrossRef]
- FAO. FAO Soils Portal. 2016. Available online: http://www.fao.org/soils-portal/soil-management/management-of-some-problem-soils/salt-affected-soils/more-information-on-salt-affected-soils/en/ (accessed on 15 November 2018 ).
- Allbed, A.; Kumar, L.; Sinha, P. Mapping and Modelling Spatial Variation in Soil Salinity in the Al Hassa Oasis Based on Remote Sensing Indicators and Regression Techniques. Remote Sens. 2014, 6, 1137–1157. [Google Scholar] [CrossRef] [Green Version]
- Allbed, A.; Kumar, L.; Aldakheel, Y.Y. Assessing soil salinity using soil salinity and vegetation indices derived from IKONOS high-spatial resolution imageries: Applications in a date palm dominated region. Geoderma 2014, 230–231, 1–8. [Google Scholar] [CrossRef]
- Douaoui, A.E.K.; Nicolas, H.; Walter, C. Detecting salinity hazards within a semiarid context by means of combining soil and remote-sensing data. Geoderma 2006, 134, 217–230. [Google Scholar] [CrossRef]
- Sidike, A.; Zhao, S.; Wen, Y. Estimating soil salinity in Pingluo County of China using QuickBird data and soil reflectance spectra. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 156–175. [Google Scholar] [CrossRef]
- El Harti, A.; Lhissou, R.; Chokmani, K.; Ouzemou, J.-E.; Hassouna, M.; Bachaoui, E.M.; El Ghmari, A. Spatiotemporal monitoring of soil salinization in irrigated Tadla Plain (Morocco) using satellite spectral indices. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 64–73. [Google Scholar] [CrossRef]
- Mashimbye, Z.E.; Cho, M.A.; Nell, J.P.; De Clercq, W.P.; Van Niekerk, A.; Turner, D.P. Model-Based Integrated Methods for Quantitative Estimation of Soil Salinity from Hyperspectral Remote Sensing Data: A Case Study of Selected South African Soils. Pedosphere 2012, 22, 640–649. [Google Scholar] [CrossRef]
- Weng, Y.-L.; Gong, P.; Zhu, Z.-L. A Spectral Index for Estimating Soil Salinity in the Yellow River Delta Region of China Using EO-1 Hyperion Data. Pedosphere 2010, 20, 378–388. [Google Scholar] [CrossRef]
- Lu, D. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Barbouchi, M.; Abdelfattah, R.; Chokmani, K.; Aissa, N.B.; Lhissou, R.; El Harti, A. Soil salinity characterization using polarimetric InSAR coherence: Case studies in Tunisia and Morocco. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3823–3832. [Google Scholar] [CrossRef]
- Shao, Y.; Hu, Q.; Guo, H.; Lu, Y.; Dong, Q.; Han, C. Effect of dielectric properties of moist salinized soils on backscattering coefficients extracted from RADARSAT image. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1879–1888. [Google Scholar] [CrossRef]
- Engman, E.T. Applications of microwave remote sensing of soil moisture for water resources and agriculture. Remote Sens. Environ. 1991, 35, 213–226. [Google Scholar] [CrossRef]
- Horikoshi, S.; Schiffmann, R.F.; Fukushima, J.; Serpone, N. Microwave Chemical and Materials Processing; Springer: Berlin, Germany, 2018. [Google Scholar]
- Lasne, Y.; Paillou, P.; Freeman, A.; Farr, T.; McDonald, K.C.; Ruffie, G.; Malezieux, J.-M.; Chapman, B.; Demontoux, F. Effect of salinity on the dielectric properties of geological materials: Implication for soil moisture detection by means of radar remote sensing. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1674–1688. [Google Scholar] [CrossRef]
- Bell, D.; Menges, C.; Bartolo, R.; Ahmad, W.; VanZyl, J. A multistaged approach to mapping soil salinity in a tropical coastal environment using airborne SAR and Landsat TM data. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, IGARSS’01, Sydney, NSW, Australia, 9–13 July 2001; IEEE: Piscataway, NJ, USA, 2001; pp. 1309–1311. [Google Scholar]
- Metternicht, G. Fuzzy classification of JERS-1 SAR data: An evaluation of its performance for soil salinity mapping. Ecol. Model. 1998, 111, 61–74. [Google Scholar] [CrossRef]
- Farifteh, J.; Van der Meer, F.; Atzberger, C.; Carranza, E.J.M. Quantitative analysis of salt-affected soil reflectance spectra: A comparison of two adaptive methods (PLSR and ANN). Remote Sens. Environ. 2007, 110, 59–78. [Google Scholar] [CrossRef]
- Nurmemet, I.; Ghulam, A.; Tiyip, T.; Elkadiri, R.; Ding, J.-L.; Maimaitiyiming, M.; Abliz, A.; Sawut, M.; Zhang, F.; Abliz, A. Monitoring soil salinization in Keriya River Basin, Northwestern China using passive reflective and active microwave remote sensing data. Remote Sens. 2015, 7, 8803–8829. [Google Scholar] [CrossRef]
- Nurmemet, I.; Sagan, V.; Ding, J.-L.; Halik, Ü.; Abliz, A.; Yakup, Z. A WFS-SVM Model for Soil Salinity Mapping in Keriya Oasis, Northwestern China Using Polarimetric Decomposition and Fully PolSAR Data. Remote Sens. 2018, 10, 598. [Google Scholar] [CrossRef]
- Taghadosi, M.M.; Hasanlou, M.; Eftekhari, K. Soil salinity mapping using dual-polarized SAR Sentinel-1 imagery. Int. J. Remote Sens. 2018, 1–16. [Google Scholar] [CrossRef]
- Le, A.; Du, L.; Tristan, S. Rapid integrated and ecosystem-based assessment of climate change vulnerability and adaptation for Ben Tre Province, Viet Nam. J. Sci. Technol. 2014, 52, 287–293. [Google Scholar]
- Kontgis, C.; Schneider, A.; Ozdogan, M. Mapping rice paddy extent and intensification in the Vietnamese Mekong River Delta with dense time stacks of Landsat data. Remote Sens. Environ. 2015, 169, 255–269. [Google Scholar] [CrossRef]
- Vo, T.B.T.; Wassmann, R.; Tirol-Padre, A.; Cao, V.P.; MacDonald, B.; Espaldon, M.V.O.; Sander, B.O. Methane emission from rice cultivation in different agro-ecological zones of the Mekong river delta: Seasonal patterns and emission factors for baseline water management. Soil Sci. Plant Nutr. 2018, 64, 47–58. [Google Scholar] [CrossRef]
- Renaud, F.G.; Le, T.T.H.; Lindener, C.; Guong, V.T.; Sebesvari, Z. Resilience and shifts in agro-ecosystems facing increasing sea-level rise and salinity intrusion in Ben Tre Province, Mekong Delta. Clim. Chang. 2015, 133, 69–84. [Google Scholar] [CrossRef]
- Sharma, R.; Bell, R.; Wong, M. Dissolved reactive phosphorus played a limited role in phosphorus transport via runoff, throughflow and leaching on contrasting cropping soils from southwest Australia. Sci. Total Environ. 2017, 577, 33–44. [Google Scholar] [CrossRef] [PubMed]
- ESA. SENTINEL-1 SAR User Guide Introduction. 2016. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-1-sar (accessed on 14 October 2018).
- Rucci, A.; Ferretti, A.; Guarnieri, A.M.; Rocca, F. Sentinel 1 SAR interferometry applications: The outlook for sub millimeter measurements. Remote Sens. Environ. 2012, 120, 156–163. [Google Scholar] [CrossRef]
- Peter, H.; Jäggi, A.; Fernández, J.; Escobar, D.; Ayuga, F.; Arnold, D.; Wermuth, M.; Hackel, S.; Otten, M.; Simons, W.; et al. Sentinel-1A—First precise orbit determination results. Adv. Space Res. 2017, 60, 879–892. [Google Scholar] [CrossRef]
- Jiang, H.; Rusuli, Y.; Amuti, T.; He, Q. Quantitative assessment of soil salinity using multi-source remote sensing data based on the support vector machine and artificial neural network. Int. J. Remote Sens. 2018, 1–23. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Information Science and Statistics; Springer. Inc.: Secaucus, NJ, USA, 2006. [Google Scholar]
- Rodríguez-Fernández, N.J.; Aires, F.; Richaume, P.; Kerr, Y.H.; Prigent, C.; Kolassa, J.; Cabot, F.; Jiménez, C.; Mahmoodi, A.; Drusch, M. Soil moisture retrieval using neural networks: Application to SMOS. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5991–6007. [Google Scholar] [CrossRef]
- Tien Bui, D.; Tuan, T.A.; Klempe, H.; Pradhan, B.; Revhaug, I. Spatial prediction models for shallow landslide hazards: A comparative assessment of the efficacy of support vector machines, artificial neural networks, kernel logistic regression, and logistic model tree. Landslides 2016, 13, 361–378. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1998; 842p. [Google Scholar]
- Witten, I.H.; Frank, E.; Mark, A.H. Data Mining: Practical Machine Learning Tools and Techniques, 3rd ed.; Morgan Kaufmann: Burlington, VT, USA, 2011; 558p. [Google Scholar]
- Blix, K.; Camps-Valls, G.; Jenssen, R. Gaussian process sensitivity analysis for oceanic chlorophyll estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1265–1277. [Google Scholar] [CrossRef]
- Stamenkovic, J.; Guerriero, L.; Ferrazzoli, P.; Notarnicola, C.; Greifeneder, F.; Thiran, J.-P. Soil Moisture Estimation by SAR in Alpine Fields Using Gaussian Process Regressor Trained by Model Simulations. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4899–4912. [Google Scholar] [CrossRef]
- Vafaei, S.; Soosani, J.; Adeli, K.; Fadaei, H.; Naghavi, H.; Pham, T.D.; Tien Bui, D. Improving accuracy estimation of forest aboveground biomass based on incorporation of ALOS-2 PALSAR-2 and sentinel-2A imagery and machine learning: A case study of the Hyrcanian forest area (Iran). Remote Sens. 2018, 10, 172. [Google Scholar] [CrossRef]
- Rasmussen, C.E. Gaussian processes in machine learning. In Advanced Lectures on Machine Learning; Springer: Berlin, Germany, 2004; pp. 63–71. [Google Scholar]
- Campos-Taberner, M.; García-Haro, F.J.; Camps-Valls, G.; Grau-Muedra, G.; Nutini, F.; Crema, A.; Boschetti, M. Multitemporal and multiresolution leaf area index retrieval for operational local rice crop monitoring. Remote Sens. Environ. 2016, 187, 102–118. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 1. [Google Scholar]
- Vapnik, V.N. Statistical Learning Theory; Wiley-Interscience: Hoboken, NJ, USA, 1998; 736p. [Google Scholar]
- Ali, I.; Greifeneder, F.; Stamenkovic, J.; Neumann, M.; Notarnicola, C. Review of machine learning approaches for biomass and soil moisture retrievals from remote sensing data. Remote Sens. 2015, 7, 16398–16421. [Google Scholar] [CrossRef]
- Were, K.; Bui, D.T.; Dick, Ø.B.; Singh, B.R. A comparative assessment of support vector regression, artificial neural networks, and random forests for predicting and mapping soil organic carbon stocks across an Afromontane landscape. Ecol. Indic. 2015, 52, 394–403. [Google Scholar] [CrossRef]
- Aldabaa, A.A.A.; Weindorf, D.C.; Chakraborty, S.; Sharma, A.; Li, B. Combination of proximal and remote sensing methods for rapid soil salinity quantification. Geoderma 2015, 239–240, 34–46. [Google Scholar] [CrossRef]
- Garcia, M.; Saatchi, S.; Casas, A.; Koltunov, A.; Ustin, S.; Ramirez, C.; Garcia-Gutierrez, J.; Balzter, H. Quantifying biomass consumption and carbon release from the California Rim fire by integrating airborne LiDAR and Landsat OLI data. J. Geophys. Res. Biogeosci. 2017, 122, 340–353. [Google Scholar] [CrossRef] [Green Version]
- Zhu, K.; Song, X.; Xue, D. A roller bearing fault diagnosis method based on hierarchical entropy and support vector machine with particle swarm optimization algorithm. Measurement 2014, 47, 669–675. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. Training v-support vector regression: Theory and algorithms. Neural Comput. 2002, 14, 1959–1977. [Google Scholar] [CrossRef]
- Platt, J. Sequential Minimal Optimization: A Fast Algorithm for Training Support Vector Machines. 1998. Available online: https://www.microsoft.com/en-us/research/publication/sequential-minimal-optimization-a-fast-algorithm-for-training-support-vector-machines/ (accessed on 10 January 2019).
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Friedman, J.; Hastie, T.; Tibshirani, R. The Elements of Statistical Learning; Springer Series in Statistics; Springer: New York, NY, USA, 2001; Volume 1. [Google Scholar]
- Forkuor, G.; Hounkpatin, O.K.; Welp, G.; Thiel, M. High resolution mapping of soil properties using remote sensing variables in South-Western Burkina Faso: A comparison of machine learning and multiple linear regression models. PLoS ONE 2017, 12, e0170478. [Google Scholar] [CrossRef]
- Ferreira, M.P.; Féret, J.-B.; Grau, E.; Gastellu-Etchegorry, J.-P.; Shimabukuro, Y.E.; de Souza Filho, C.R. Retrieving structural and chemical properties of individual tree crowns in a highly diverse tropical forest with 3D radiative transfer modeling and imaging spectroscopy. Remote Sens. Environ. 2018, 211, 276–291. [Google Scholar] [CrossRef]
- Wang, B.; Waters, C.; Orgill, S.; Gray, J.; Cowie, A.; Clark, A.; Liu, L. High resolution mapping of soil organic carbon stocks using remote sensing variables in the semi-arid rangelands of eastern Australia. Sci. Total Environ. 2018, 630, 367–378. [Google Scholar] [CrossRef] [PubMed]
- Witten, I.H.; Frank, E.; Hall, M.A.; Pal, C.J. Data Mining: Practical Machine Learning Tools and Techniques; Morgan Kaufmann: Burlington, MA, USA, 2016. [Google Scholar]
- Stewart, C. Exercise Sentinel-1 Processing, Course Materials. In Proceedings of the 8th ESA Training Course on Radar and Optical Remote Sensing, Cesis, Latvia, 5–9 September 2016. [Google Scholar]
- Foumelis, M. ESA Sentinel-1 Toolbox Generation of SAR Backscattering Mosaics, Course Materials. In Proceedings of the 6th ESA Advanced Training Course on Land Remote Sensing, Bucharest, Romania, 14–18 September 2015. [Google Scholar]
- Poenaru, V.; Badea, A.; Cimpeanu, S.M.; Irimescu, A. Multi-temporal multi-spectral and radar remote sensing for agricultural monitoring in the Braila Plain. Agric. Agric. Sci. Procedia 2015, 6, 506–516. [Google Scholar] [CrossRef]
- Small, D. Flattening gamma: Radiometric terrain correction for SAR imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- Scharien, R.K.; Segal, R.; Nasonova, S.; Nandan, V.; Howell, S.E.L.; Haas, C. Winter Sentinel-1 Backscatter as a Predictor of Spring Arctic Sea Ice Melt Pond Fraction. Geophys. Res. Lett. 2017, 44, 12262–12270. [Google Scholar] [CrossRef]
- Rizzoli, P.; Bello, J.L.B.; Pulella, A.; Sica, F.; Zink, M. A Novel Approach to Monitor Deforestation in the Amazon Rainforest by Means of Sentinel-1 and Tandem-X Data. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 192–195. [Google Scholar]
- Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.-P. A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote Sens. 2018, 10, 217. [Google Scholar] [CrossRef]
- Torres, L.; Sant’Anna, S.J.; da Costa Freitas, C.; Frery, A.C. Speckle reduction in polarimetric SAR imagery with stochastic distances and nonlocal means. Pattern Recognit. 2014, 47, 141–157. [Google Scholar] [CrossRef] [Green Version]
- Tachikawa, T.; Kaku, M.; Iwasaki, A.; Gesch, D.B.; Oimoen, M.J.; Zhang, Z.; Danielson, J.J.; Krieger, T.; Curtis, B.; Haase, J. ASTER Global Digital Elevation Model Version 2—Summary of Validation Results; NASA: Washington, DC, USA, 2011.
- Cai, S.; Zhang, R.; Liu, L.; Zhou, D. A method of salt-affected soil information extraction based on a support vector machine with texture features. Math. Comput. Model. 2010, 51, 1319–1325. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 3, 610–621. [Google Scholar] [CrossRef]
- Ren, J.; Li, X.; Zhao, K.; Fu, B.; Jiang, T. Study of an on-line measurement method for the salt parameters of soda-saline soils based on the texture features of cracks. Geoderma 2016, 263, 60–69. [Google Scholar] [CrossRef]
- Matin, S.S.; Farahzadi, L.; Makaremi, S.; Chelgani, S.C.; Sattari, G. Variable selection and prediction of uniaxial compressive strength and modulus of elasticity by random forest. Appl. Soft Comput. 2018, 70, 980–987. [Google Scholar] [CrossRef]
- Genuer, R.; Poggi, J.-M.; Tuleau-Malot, C. Variable selection using random forests. Pattern Recognit. Lett. 2010, 31, 2225–2236. [Google Scholar] [CrossRef] [Green Version]
- Grömping, U. Variable importance assessment in regression: Linear regression versus random forest. Am. Stat. 2009, 63, 308–319. [Google Scholar] [CrossRef]
- Peters, J.; De Baets, B.; Verhoest, N.E.; Samson, R.; Degroeve, S.; De Becker, P.; Huybrechts, W. Random forests as a tool for ecohydrological distribution modelling. Ecol. Model. 2007, 207, 304–318. [Google Scholar] [CrossRef]
- Behnamian, A.; Millard, K.; Banks, S.N.; White, L.; Richardson, M.; Pasher, J. A systematic approach for variable selection with Random Forests: Achieving stable variable importance values. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1988–1992. [Google Scholar] [CrossRef]
- Nawar, S.; Buddenbaum, H.; Hill, J.; Kozak, J. Modeling and mapping of soil salinity with reflectance spectroscopy and landsat data using two quantitative methods (PLSR and MARS). Remote Sens. 2014, 6, 10813–10834. [Google Scholar] [CrossRef]
- Shepherd, K.D.; Shepherd, G.; Walsh, M.G. Land health surveillance and response: A framework for evidence-informed land management. Agric. Syst. 2015, 132, 93–106. [Google Scholar] [CrossRef]
- Bui, K.-T.T.; Tien Bui, D.; Zou, J.; Van Doan, C.; Revhaug, I. A novel hybrid artificial intelligent approach based on neural fuzzy inference model and particle swarm optimization for horizontal displacement modeling of hydropower dam. Neural Comput. Appl. 2016, 1–12. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variable | Permutation-Based MSE Reduction | Number of Nodes Used in the RF Model | Variable Importance Ranked |
|---|---|---|---|
| 135.33 | 584 | 1 | |
| 133.32 | 677 | 2 | |
| 115.98 | 1089 | 3 | |
| 81.23 | 314 | 4 | |
| 53.39 | 591 | 5 | |
| 50.98 | 457 | 6 | |
| 49.29 | 347 | 7 | |
| 47.82 | 351 | 8 | |
| 44.48 | 349 | 9 | |
| 42.98 | 731 | 10 | |
| 42.04 | 294 | 11 | |
| 40.13 | 414 | 12 | |
| 39.70 | 343 | 13 | |
| 35.52 | 538 | 14 | |
| 33.08 | 346 | 15 | |
| 32.14 | 440 | 16 | |
| 27.33 | 611 | 17 | |
| 27.26 | 736 | 18 |
| No | MLP-NN (IN × HN × OP) | Training Set | Validating Set | ||||
|---|---|---|---|---|---|---|---|
| RMSE | MAE | r | RMSE | MAE | r | ||
| 1 | 18 × 1 × 1 | 3.925 | 2.998 | 0.848 | 4.226 | 3.077 | 0.523 |
| 2 | 18 × 2 × 1 | 3.919 | 2.994 | 0.848 | 4.214 | 3.074 | 0.525 |
| 3 | 18 × 3 × 1 | 3.923 | 3.008 | 0.847 | 4.207 | 3.068 | 0.526 |
| 4 | 18 × 4 × 1 | 3.704 | 2.864 | 0.845 | 3.846 | 2.929 | 0.553 |
| 5 | 18 × 5 × 1 | 3.724 | 2.893 | 0.841 | 3.792 | 2.892 | 0.56 |
| 6 | 18 × 6 × 1 | 3.744 | 2.936 | 0.839 | 3.450 | 2.646 | 0.624 |
| 7 | 18 × 7 × 1 | 3.775 | 2.969 | 0.838 | 3.484 | 2.687 | 0.620 |
| 8 | 18 × 8 × 1 | 4.246 | 3.457 | 0.831 | 4.103 | 3.45 | 0.354 |
| 9 | 18 × 9 × 1 | 3.910 | 3.002 | 0.846 | 4.147 | 3.036 | 0.532 |
| 10 | 18 × 10 × 1 | 4.567 | 3.736 | 0.834 | 4.286 | 3.372 | 0.513 |
| 11 | 18 × 11 × 1 | 4.563 | 3.699 | 0.837 | 4.332 | 3.363 | 0.504 |
| 12 | 18 × 12 × 1 | 4.413 | 3.840 | 0.818 | 4.030 | 3.579 | 0.558 |
| 13 | 18 × 14 × 1 | 4.637 | 3.821 | 0.829 | 4.354 | 3.439 | 0.507 |
| 14 | 18 × 16 × 1 | 4.030 | 3.219 | 0.836 | 3.891 | 3.162 | 0.562 |
| 15 | 18 × 18 × 1 | 4.618 | 3.825 | 0.833 | 4.388 | 3.561 | 0.481 |
| 16 | 18 × 20 × 1 | 4.581 | 3.823 | 0.830 | 4.327 | 3.620 | 0.479 |
| 17 | 18 × 22 × 1 | 2.413 | 1.829 | 0.904 | 4.643 | 3.615 | 0.320 |
| 18 | 18 × 24 × 1 | 2.206 | 1.519 | 0.913 | 4.427 | 3.079 | 0.565 |
| 19 | 18 × 26 × 1 | 2.251 | 1.592 | 0.912 | 4.079 | 3.019 | 0.558 |
| 20 | 18 × 28 × 1 | 2.512 | 1.878 | 0.901 | 4.423 | 3.052 | 0.542 |
| 21 | 18 × 30 × 1 | 2.211 | 1.523 | 0.912 | 4.070 | 2.862 | 0.551 |
| No | RBF-NN (IN × CL × OP) | Training Set | Validating Set | ||||
|---|---|---|---|---|---|---|---|
| RMSE | MAE | r | RMSE | MAE | r | ||
| 1 | 18 × 2 × 1 | 5.302 | 3.247 | 0.005 | 4.136 | 3.022 | 0.121 |
| 2 | 18 × 3 × 1 | 5.247 | 3.068 | 0.144 | 4.211 | 3.096 | −0.051 |
| 3 | 18 × 4 × 1 | 5.160 | 2.962 | 0.230 | 4.308 | 3.134 | 0.006 |
| 4 | 18 × 5 × 1 | 5.043 | 2.829 | 0.309 | 3.747 | 2.608 | 0.431 |
| 5 | 18 × 6 × 1 | 4.649 | 2.691 | 0.481 | 5.011 | 3.309 | −0.226 |
| 6 | 18 × 7 × 1 | 4.663 | 2.741 | 0.476 | 4.730 | 3.012 | −0.115 |
| 7 | 18 × 8 × 1 | 4.663 | 2.736 | 0.476 | 4.823 | 3.223 | −0.114 |
| 8 | 18 × 9 × 1 | 4.640 | 2.744 | 0.484 | 4.339 | 3.092 | 0.187 |
| 9 | 18 × 10 × 1 | 4.680 | 2.684 | 0.470 | 4.112 | 2.832 | 0.291 |
| 10 | 18 × 11 × 1 | 4.554 | 2.517 | 0.512 | 4.324 | 2.836 | 0.218 |
| 11 | 18 × 12 × 1 | 4.299 | 2.539 | 0.585 | 4.103 | 2.855 | 0.301 |
| 12 | 18 × 14 × 1 | 4.217 | 2.452 | 0.606 | 4.775 | 3.123 | 0.045 |
| 13 | 18 × 16 × 1 | 4.402 | 2.414 | 0.557 | 4.556 | 3.052 | 0.178 |
| 14 | 18 × 17 × 1 | 3.833 | 2.096 | 0.691 | 2.981 | 1.924 | 0.729 |
| 14 | 18 × 18 × 1 | 3.833 | 2.087 | 0.691 | 3.210 | 2.074 | 0.692 |
| 15 | 18 × 19 × 1 | 3.825 | 2.08 | 0.693 | 3.187 | 2.008 | 0.707 |
| 16 | 18 × 20 × 1 | 3.760 | 1.934 | 0.705 | 3.249 | 2.059 | 0.698 |
| 17 | 18 × 21 × 1 | 3.702 | 1.822 | 0.716 | 2.732 | 1.586 | 0.772 |
| 18 | 18 × 22 × 1 | 3.510 | 1.655 | 0.750 | 7.225 | 3.417 | 0.327 |
| 19 | 18 × 24 × 1 | 3.508 | 1.612 | 0.750 | 7.142 | 3.362 | 0.323 |
| 20 | 18 × 26 × 1 | 3.344 | 1.492 | 0.776 | 7.130 | 3.382 | 0.191 |
| 21 | 18 × 28 × 1 | 3.370 | 1.489 | 0.772 | 7.353 | 3.593 | 0.118 |
| 22 | 18 × 30 × 1 | 3.330 | 1.364 | 0.778 | 7.558 | 3.746 | 0.072 |
| Soil Salinity Model | Training Set | Validation Set | ||||
|---|---|---|---|---|---|---|
| RMSE | MAE | r | RMSE | MAE | r | |
| Multilayer Perceptron Neural Networks (MLP-NN) | 3.744 | 2.936 | 0.836 | 3.450 | 2.646 | 0.624 |
| Radial Basis Function Neural Networks (RBF-NN) | 3.702 | 1.822 | 0.716 | 2.732 | 1.586 | 0.772 |
| Gaussian Processes (GP) | 3.170 | 1.860 | 0.839 | 2.885 | 1.897 | 0.808 |
| Support Vector Regression (SVR) | 4.784 | 1.868 | 0.685 | 3.946 | 2.091 | 0.664 |
| Random Forests (RF) | 2.008 | 1.252 | 0.949 | 3.417 | 2.269 | 0.581 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoa, P.V.; Giang, N.V.; Binh, N.A.; Hai, L.V.H.; Pham, T.-D.; Hasanlou, M.; Tien Bui, D. Soil Salinity Mapping Using SAR Sentinel-1 Data and Advanced Machine Learning Algorithms: A Case Study at Ben Tre Province of the Mekong River Delta (Vietnam). Remote Sens. 2019, 11, 128. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020128
Hoa PV, Giang NV, Binh NA, Hai LVH, Pham T-D, Hasanlou M, Tien Bui D. Soil Salinity Mapping Using SAR Sentinel-1 Data and Advanced Machine Learning Algorithms: A Case Study at Ben Tre Province of the Mekong River Delta (Vietnam). Remote Sensing. 2019; 11(2):128. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020128
Chicago/Turabian StyleHoa, Pham Viet, Nguyen Vu Giang, Nguyen An Binh, Le Vu Hong Hai, Tien-Dat Pham, Mahdi Hasanlou, and Dieu Tien Bui. 2019. "Soil Salinity Mapping Using SAR Sentinel-1 Data and Advanced Machine Learning Algorithms: A Case Study at Ben Tre Province of the Mekong River Delta (Vietnam)" Remote Sensing 11, no. 2: 128. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11020128