
Stand Volume Estimation Using the k-NN Technique Combined with Forest Inventory Data, Satellite Image Data and Additional Feature Variables


Abstract
:
1. Introduction
2. Materials and Methods
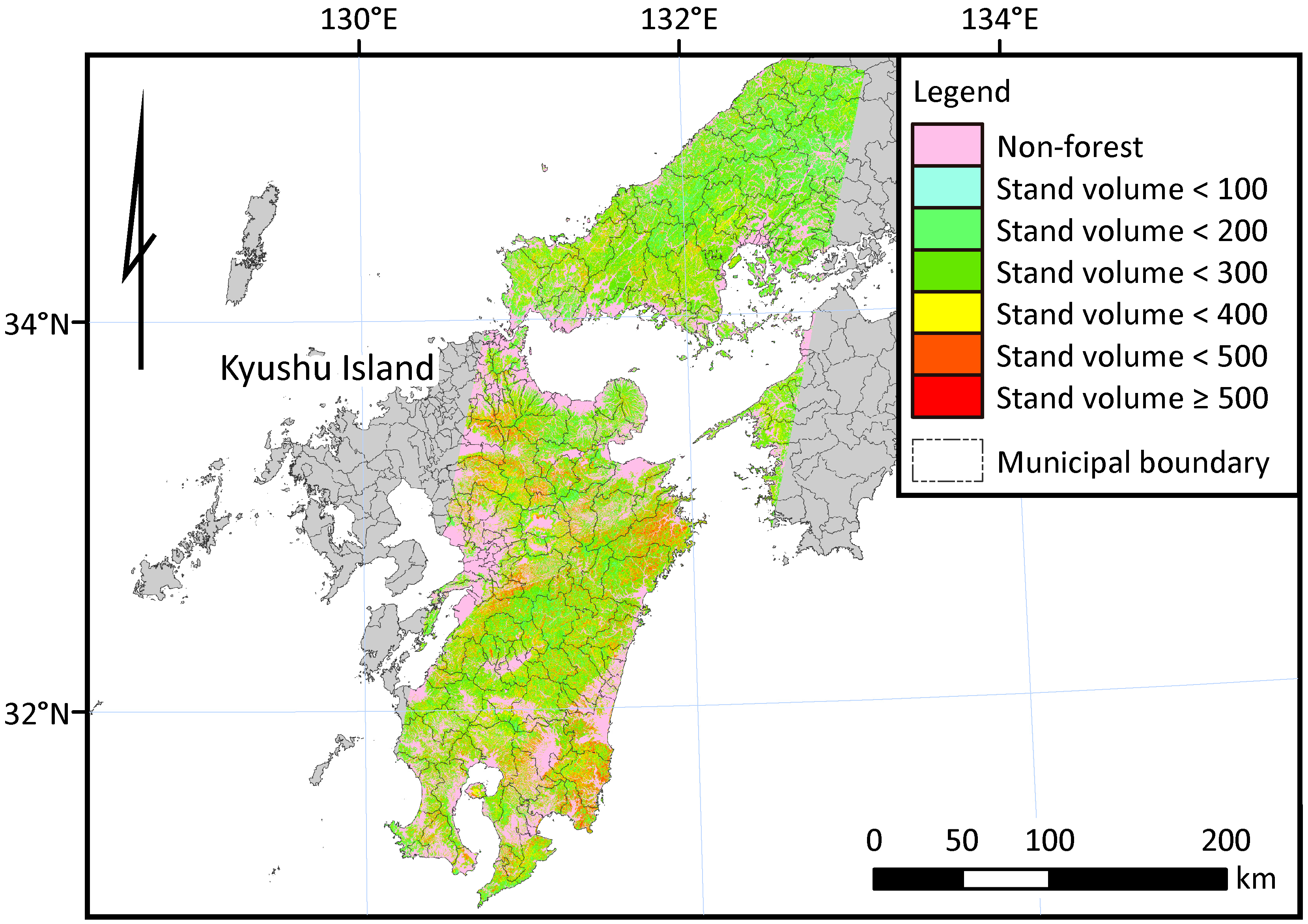
2.1. Study Area

2.2. Satellite Image Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Sun Elevation Angle * (°) | Cloud Coverage ** (%) |
|---|---|---|
| 4 April 2001 | 54.1 | 0 |
| 25 May 2002 | 65.7 | 0 |
| 12 July 2002 | 64.5 | 20.3 |
2.3. In Situ Data
2.4. Additional Feature Variables
| Data | n | Mean (m3/ha) | SD (m3/ha) | Min (m3/ha) | Max (m3/ha) |
|---|---|---|---|---|---|
| All data | 891 | 254.1 | 175.2 | 1.1 | 1,007.7 |
| ECF | 501 | 330.7 | 184.9 | 1.1 | 1,007.7 |
| BF | 390 | 155.7 | 95.1 | 2.5 | 665.0 |
2.5. Stand Volume Estimation and Accuracy Assessment
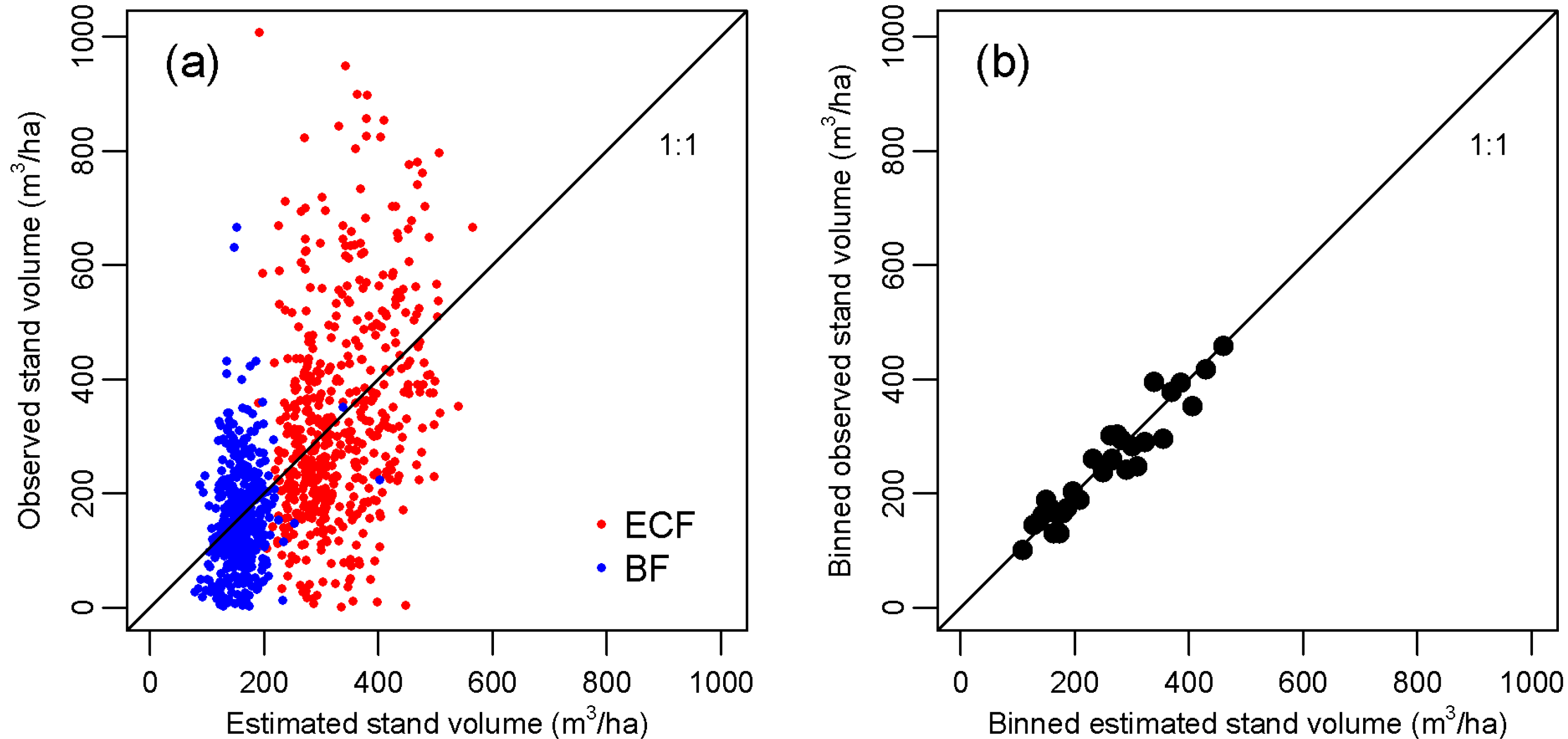
3. Results

| Error | D0404 | D0525 | D0712 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| All | ECF | BF | All | ECF | BF | All | ECF | BF | |
| Analysis 1 | |||||||||
| RMSE (m3/ha) | 160.3 | 187.4 | 116.7 | 157.1 | 182.5 | 116.7 | 158.5 | 185.5 | 115.0 |
| rRMSE (%) | 63.1 | 56.7 | 75.0 | 61.8 | 55.2 | 75.0 | 62.4 | 56.1 | 73.9 |
| Analysis 2 | |||||||||
| RMSE (m3/ha) | 150.2 | 181.9 | 94.8 | 146.9 | 176.0 | 97.6 | 149.8 | 181.6 | 94.4 |
| rRMSE (%) | 59.1 | 55.0 | 60.9 | 57.8 | 53.2 | 62.7 | 59.0 | 54.9 | 60.6 |
| Model | Analysis 1 | Analysis 2 | ||||
|---|---|---|---|---|---|---|
| D0404 | D0525 | D0712 | D0404 | D0525 | D0712 | |
| Basic model | 160.3 | 157.1 | 158.5 | 150.2 | 146.9 | 149.8 |
| Basic model + Elev | 159.1 | 157.9 | 158.0 | 149.4 | 148.7 | 148.9 |
| Basic model + Slope | 160.6 | 159.0 | 158.6 | 151.5 | 148.6 | 150.2 |
| Basic model + SRI | 161.8 | 158.3 | 159.3 | 152.1 | 148.2 | 149.8 |
| Basic model + WI | 159.9 | 157.4 | 157.8 | 149.5 | 147.4 | 148.7 |
| Basic model + CI | 159.7 | 157.4 | 157.0 | 148.8 | 147.6 | 148.1 |
| Basic model + SRF | 157.8 | 155.2 | 157.0 | 147.9 | 146.2 | 148.3 |
| Basic model + WRF | 160.3 | 156.8 | 158.3 | 150.7 | 146.5 | 149.3 |
| Optimum combination model | 157.8 a | 155.2 b | 155.1 c | 147.2 d | 146.2 e | 145.8 f |

4. Discussion

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tomppo, E.; Schadauer, K.; McRoberts, R.E.; Gschwantner, T.; Gabler, K.; Ståhl, G. Introduction. In National Forest Inventories: Pathways for Common Reporting; Tomppo, E., Gschwantner, Th., Lawrence, M., McRoberts, R.E., Eds.; Springer-Verlag: New York, NY, USA, 2010; pp. 1–18. [Google Scholar]
- Tomppo, E.; Haakana, M.; Katila, M.; Peräsaari, J. Multi-Source National Forest Inventory: Methods and Applications; Springer: New York, NY, USA, 2008. [Google Scholar]
- Tomppo, E.; Olsson, H.; Ståhl, G.; Nilsson, M.; Hagner, O.; Katila, M. Combining national forest inventory field plots and remote sensing data for forest databases. Remote Sens. Environ. 2008, 112, 1982–1999. [Google Scholar] [CrossRef]
- Olsson, H.; Nilsson, M.; Persson, A. GEOSS possibilities and challenges related to nation wide forest monitoring. In Proceedings of the ISPRS Commission VII Term Symposium, Enschede, The Netherlands, 8–11 May 2006.
- McRoberts, R.E.; Tomppo, E.O. Remote sensing support for national forest inventories. Remote Sens. Environ. 2007, 110, 412–419. [Google Scholar] [CrossRef]
- Reese, H.; Nilsson, M.; Granqvist Pahlén, T.; Hagner, O.; Joyce, S.; Tingelöf, U.; Egberth, M.; Olsson, H. Countrywide estimates of forest variables using satellite data and field data from the National Forest Inventory. Ambio 2003, 32, 542–548. [Google Scholar] [PubMed]
- Gu, H.; Dai, L.; Wu, G.; Xu, D.; Wang, S.; Wang, H. Estimation of forest volumes by integrating Landsat TM imagery and forest inventory data. Sci. China Ser. E Technol. Sci. 2006, 49, 54–62. [Google Scholar] [CrossRef]
- Tomppo, E.; Korhonen, K.T.; Heikkinen, J.; Yli-Kojola, H. Multi-source inventory of the forests of the Hebei forestry bureau, Heilongjiang, China. Silva Fenn. 2001, 35, 309–328. [Google Scholar] [CrossRef]
- McInerney, D.O.; Nieuwenhuis, M. A comparative analysis of kNN and decision tree methods for the Irish National Forest Inventory. Int. J. Remote Sens. 2009, 30, 4937–4955. [Google Scholar] [CrossRef]
- Gjertsen, A.K. Accuracy of forest mapping based on Landsat TM data and a kNN-based method. Remote Sens. Environ. 2007, 110, 420–430. [Google Scholar] [CrossRef]
- McRoberts, R.E.; Holden, G.R.; Nelson, M.D.; Liknes, G.C.; Gormanson, D.D. Using satellite imagery as ancillary data for increasing the precision of estimates for the Forest Inventory and analysis program of the USDA Forest Service. Can. J. For. Res. 2006, 36, 2968–2980. [Google Scholar]
- Nilsson, M.; Folving, S.; Kennedy, P.; Puumalainen, J.; Chirici, G.; Corona, P.; Marchetti, M.; Olsson, H.; Ricotta, C.; Ringvall, A.; et al. Combining remote sensing and field data for deriving unbiased estimated of forest parameters over large regions. In Advances in Forest Inventory for Sustainable Forest Management and Biodiversity Monitoring; Corona, P., KöhlKöhl, M., Marchetti, M., Eds.; Kruwer Academic Publishers: Dordrecht, The Netherlands, 2003; pp. 19–32. [Google Scholar]
- Nilsson, M.; Holm, S.; Reese, H.; Wallerman, J.; Engberg, J. Improved forest statistics from the Swedish National Inventory by combining field data and optical satellite data using post-stratification. In Proceedings of the ForestSat 2005, Borȧs, Sweden, 31 May–3 June 2005.
- Tomppo, E. Multi-source national forest inventory of Finland. In Proceedings of the IUFRO XX World Congress, Tampere, Finland, 6–12 August 1995; Paivinen, R., Vanclay, J., Miina, S., Eds.; EFI: Joensuu, Finland, 1996; pp. 27–41. [Google Scholar]
- Tokola, T.; Heikkilä, J. Improving satellite image based forest inventory by using a priori site quality information. Silva Fenn. 1997, 31, 67–78. [Google Scholar] [CrossRef]
- Tomppo, E.; Goulding, C.; Katila, M. Adapting finnish multi-source forest inventory techniques to the New Zealand preharvest inventory. Scand. J. For. Res. 1999, 14, 182–192. [Google Scholar] [CrossRef]
- Katila, M.; Tomppo, E. Selecting estimation parameters for the Finnish multisource National Forest Inventory. Remote Sens. Environ. 2001, 76, 16–32. [Google Scholar] [CrossRef]
- Tomppo, E.; Halme, M. Using coarse scale forest variables as ancillary information and weighting of variables in k-NN estimation: A genetic algorithm approach. Remote Sens. Environ. 2004, 92, 1–20. [Google Scholar] [CrossRef]
- Moeur, M.; Stage, A.R. Most similar neighbor: An improved sampling inference procedure for natural resource planning. For. Sci. 1995, 41, 337–359. [Google Scholar]
- Packalén, P.; Maltamo, M. The k-MSN method for the prediction of species-specific stand attributes using airborne laser scanning and aerial photographs. Remote Sens. Environ. 2007, 109, 328–341. [Google Scholar] [CrossRef]
- Beaudoin, A.; Bernier, P.Y.; Guindon, L.; Villemaire, P.; Guo, X.J.; Stinson, G.; Bergeron, T.; Magnussen, S.; Hall, R.J. Mapping attributes of Canada’s forests at moderate resolution through kNN and MODIS imagery. Can. J. For. Res. 2014, 44, 521–532. [Google Scholar] [CrossRef]
- Wilson, B.T.; Woodall, C.W.; Griffith, D.M. Imputing forest carbon stock estimates from inventory plots to a nationally continuous coverage. Carbon Balance Manag. 2013, 8, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Hirata, Y.; Imaizumi, Y.; Masuyama, T.; Matsumoto, Y.; Miyazono, H.; Goto, T. Japan. In National Forest Inventories: Pathways for Common Reporting; Tomppo, E., Gschwantner, Th., Lawrence, M., McRoberts, R.E., Eds.; Springer-Verlag: New York, NY, USA, 2010; pp. 333–340. [Google Scholar]
- Iehara, T. New Japanese forest resource monitoring system. Sanrin 1999, 1384, 54–61. [Google Scholar]
- Kajisa, T.; Murakami, T.; Mizoue, N.; Kitahara, F.; Yoshida, S. Estimation of stand volumes using the k-nearest neighbors method in Kyushu, Japan. J. For. Res. 2008, 13, 249–254. [Google Scholar] [CrossRef]
- Minowa, Y.; Suzuki, N.; Tanaka, K. Estimation of site indices with a machine learning system C4.5. Jpn. J. For. Plan. 2005, 38, 143–156. [Google Scholar]
- Minowa, Y.; Suzuki, N.; Tanaka, K. Estimation of site indices with an artificial neural network. Jpn. J. For. Plan. 2005, 39, 23–38. [Google Scholar]
- Mitsuda, Y.; Yoshida, S.; Imada, M. Use of GIS-derived environmental factors in predicting site indices in Japanese larch plantations in Hokkaido. J. For. Res. 2001, 6, 87–93. [Google Scholar] [CrossRef]
- Mitsuda, Y.; Ito, S.; Sakamoto, S. Predicting the site index of sugi plantations from GIS-derived environmental factors in Miyazaki Prefecture. J. For. Res. 2007, 12, 177–186. [Google Scholar] [CrossRef]
- Nabeshima, E.; Kubo, T.; Hiura, T. Variation in tree diameter growth in response to the weather conditions and tree size in deciduous broad-leaved trees. For. Ecol. Manag. 2010, 259, 1055–1066. [Google Scholar] [CrossRef]
- Nishizono, T.; Kitahara, F.; Iehara, T.; Mitsuda, Y. Geographical variation in age—Height relationships for dominant trees in Japanese cedar (Cryptomeria japonica D. Don) forests in Japan. J. For. Res. 2014, 19, 305–316. [Google Scholar] [CrossRef]
- Teraoka, Y.; Masutani, T.; Imada, M. Estimating site index of Sugi and Hinoki from topographical factors on maps for forest management. Sci. Bull. Fac. Agric. Kyushu Univ. 1991, 45, 125–133. [Google Scholar]
- Chavez, P.S., Jr. An improved dark-object subtraction technique for atmospheric scattering correction of multispectral data. Remote Sens. Environ. 1988, 24, 459–479. [Google Scholar] [CrossRef]
- Teillet, P.M.; Fedosejevs, G. On the dark target approach to atmospheric correction of remotely sensed data. Can. J. Remote Sens. 1995, 24, 374–387. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Chirici, G.; Barbati, A.; Corona, P.; Marchetti, M.; Travaglini, D.; Maselli, F.; Bertini, R. Non-parametric and parametric methods using satellite images for estimating growing stock volume in alpine and Mediterranean forest ecosystems. Remote Sens. Environ. 2008, 112, 2686–2700. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, S.; Takahashi, T.; Saito, H.; Nishizono, T.; Iehara, T.; Kitahara, F.; Kodani, E.; Awaya, Y. Stand volume estimation using Landsat ETM+ data through atmospheric and topographic corrections in the Tohoku region, Japan. Jpn. J. For. Plan. 2013, 47, 29–34. [Google Scholar]
- Kitahara, F.; Mizoue, N.; Kajisa, T.; Yoshida, S. Positional accuracy of national forest inventory plots in Japan. J. For. Plan. 2010, 15, 73–79. [Google Scholar]
- Kitahara, F.; Mizoue, N.; Yoshida, S. Evaluation of data quality in Japanese National Forest Inventory. Environ. Monit. Assess. 2009, 159, 331–340. [Google Scholar] [CrossRef] [PubMed]
- Fazakas, Z.; Nilsson, M.; Olsson, H. Regional forest biomass and wood volume estimation using satellite data and ancillary data. Agric. For. Meteorol. 1999, 98–99, 417–425. [Google Scholar] [CrossRef]
- Hagner, O.; Reese, H. A method for calibrated maximum likelihood classification of forest types. Remote Sens. Environ. 2007, 110, 438–444. [Google Scholar] [CrossRef]
- Reese, H.; Nilsson, M.; Sandström, P.; Olsson, H. Applications using estimates of forest parameters derived from satellite and forest inventory data. Comput. Electron. Agric. 2002, 37, 37–55. [Google Scholar] [CrossRef]
- Ohsawa, M. Differentiation of vegetation zones and species strategies in the subalpine region of Mt. Fuji. Vegetatio 1984, 57, 15–52. [Google Scholar] [CrossRef]
- Keating, K.A.; Gogan, P.J.P.; Vore, J.M.; Irby, L.R. A simple solar radiation index for wildlife habitat studies. J. Wildl. Manag. 2007, 71, 1344–1348. [Google Scholar] [CrossRef]
- Japan Meteorological Agency. Mesh Climatic Data of Japan (CD-ROM); Japan Meteorological Business Support Center: Tokyo, Japan, 2002. [Google Scholar]
- Kira, T. A New Classification of Climate in Eastern Asia as the Basis for Agricultural Geography; Horicultural Institute, Kyoto University: Kyoto, Japan, 1945; pp. 1–23. [Google Scholar]
- Kira, T. Forest ecosystems of east and southeast Asia in a global perspective. Ecol. Res. 1991, 6, 185–200. [Google Scholar] [CrossRef]
- LeMay, V.; Temesgen, H. Comparison of nearest neighbor methods for estimating basal area and stems per hectare using aerial auxiliary variables. For. Sci. 2005, 51, 109–119. [Google Scholar]
- McRoberts, R.E. Estimating forest attribute parameters for small areas using nearest neighbors techniques. For. Ecol. Manag. 2012, 272, 3–12. [Google Scholar] [CrossRef]
- Mäkelä, H.; Pekkarinen, A. Estimation of timber volume at the sample plot level by means of image segmentation and Landsat TM imagery. Remote Sens. Environ. 2001, 77, 66–75. [Google Scholar] [CrossRef]
- Mäkelä, H.; Pekkarinen, A. Estimation of forest stand volumes by Landsat TM imagery and stand-level field-inventory data. For. Ecol. Manag. 2004, 196, 245–255. [Google Scholar] [CrossRef]
- Tomppo, E.; Nilsson, M.; Rosengren, M.; Aalto, P.; Kennedy, P. Simultaneous use of Landsat-TM and IRS-1C WiFS data in estimating large area tree stem volume and aboveground biomass. Remote Sens. Environ. 2002, 82, 156–171. [Google Scholar] [CrossRef]
- McRoberts, R.E.; Nelson, M.D.; Wendt, D.G. Stratified estimation of forest area using satellite imagery, inventory data, and the k-Nearest Neighbors technique. Remote Sens. Environ. 2002, 82, 457–468. [Google Scholar] [CrossRef]
- McRoberts, R.E. Diagnostic tools for nearest neighbors techniques when used with satellite imagery. Remote Sens. Environ. 2009, 113, 489–499. [Google Scholar] [CrossRef]
- Tanaka, S.; Takahashi, T.; Saito, H.; Awaya, Y.; Iehara, T.; Matsumoto, M.; Sakai, T. Simple method for land-cover mapping by combining multi-temporal Landsat ETM+ images and systematically sampled ground truth data: A case study in Japan. J. For. Plan. 2012, 18, 77–85. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanaka, S.; Takahashi, T.; Nishizono, T.; Kitahara, F.; Saito, H.; Iehara, T.; Kodani, E.; Awaya, Y. Stand Volume Estimation Using the k-NN Technique Combined with Forest Inventory Data, Satellite Image Data and Additional Feature Variables. Remote Sens. 2015, 7, 378-394. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70100378
Tanaka S, Takahashi T, Nishizono T, Kitahara F, Saito H, Iehara T, Kodani E, Awaya Y. Stand Volume Estimation Using the k-NN Technique Combined with Forest Inventory Data, Satellite Image Data and Additional Feature Variables. Remote Sensing. 2015; 7(1):378-394. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70100378
Chicago/Turabian StyleTanaka, Shinya, Tomoaki Takahashi, Tomohiro Nishizono, Fumiaki Kitahara, Hideki Saito, Toshiro Iehara, Eiji Kodani, and Yoshio Awaya. 2015. "Stand Volume Estimation Using the k-NN Technique Combined with Forest Inventory Data, Satellite Image Data and Additional Feature Variables" Remote Sensing 7, no. 1: 378-394. https://0-doi-org.brum.beds.ac.uk/10.3390/rs70100378