1. Introduction
Building structures are exposed to repetitive or temporary external stimuli caused by disasters such as earthquakes and winds and to usage by the occupants of the building during the life cycle. These stimuli may cause small or large deformations of the structures. Because the outer wall of a building is the primary structure subjected to cyclic loads, experimental studies to identify the performance of the structure that forms the outer wall, and thus to propose a design equation, have actively been conducted of late [
1,
2,
3]. If the behavior of a building structure can be accurately simulated using a mathematical model, the safety and serviceability of the structure can be evaluated precisely [
4]. However, because the actual building structures include non-linear elements such as connections, boundary elements, material properties, and sectional properties, simulating such structures is difficult. Hence, a system identification (SI) technique of evaluating the status of the structure using field measurement data obtained through scale model experiments or monitoring of the actual structure is applied [
5,
6,
7]; alternatively, a hybrid technique for improving the existing mathematical model by modeling the non-linear elements based on the measured data is used [
8,
9]. Therefore, obtaining data on the behavior of the structure is important because these data are directly or indirectly linked to the evaluation of the structure’s status.
The structure-related data to be measured can be divided into displacement and acceleration data. Because acceleration data contain global information about the structure, they exhibit low sensitivity in the estimation of local damages to the structure, and have the limitation that numerical errors occur when converting acceleration into displacement data [
10]. The sensors for measuring the displacement of the structure can be generally classified into contact- and non-contact-type sensors. Contact-type sensors include a strain gauge or a linear variable differential transformer (LVDT). The data reliability of the contact-type sensor is known to be very high, but it has low applicability to actual buildings because it requires an additional apparatus, such as a fixed reference point, a power supply device, and a data collector [
11]. The non-contact-type sensors, on the other hand, include a global positioning system (GPS) and a laser displacement sensor (LDS). These sensors have high applicability because they can be installed in a building structure more easily as compared to the contact-type sensors. The GPS, however, has a 5–10 mm error in the static state and a 10–20 mm error in the dynamic state, so the data accuracy is lower compared to that achievable with other sensors [
12]. The LDS exhibits excellent performance, with a precision of approximately 0.2 mm [
13], but the effective distance at which the equipment can obtain data is relatively shorter than that of other devices, and a fixed reference point is needed, as in the case of the contact-type sensors, when applied to an actual building. In this regard, there is a need for research into new sensors to overcome the limitations of the existing sensors, which cannot be easily applied to an actual building structure.
Since recently, studies were actively conducted on the non-contact-type vision-based displacement sensor (VDS) using images that can be easily obtained by a digital camera or a camcorder. The technical aspects of VDS related to the fields of electrical and electronic engineering [
14,
15,
16,
17] have shown much development, and VDS has been used in the civil engineering sector since the 1990s [
18]. VDS was used in the monitoring system for measuring tensile force in a cable installed in a bridge and the reliability of the cable tensile force obtained from the VDS was high [
19]. Feng and Feng [
20] reported that the natural frequency of a short-span bridge could be measured by a VDS through field tests. Song et al. [
21] experimentally showed that detection of damage in a cantilever beam was possible by processing displacement data using algorithms such as the wavelet-based damage detection algorithm. Hence, the VDS can be an alternative to the existing structural monitoring sensor to improve the applicability in the real field.
The initial VDS was used to attach the artificially produced marker to the structure, to analyze the movement of the marker in the image, and thus to extract the displacement data—This method is used widely today. Nogueira et al. [
22] measured the displacement at the time of free vibration through the VDS after installing a circular marker at the end of a simple cantilever beam and extracted the natural frequency using the data obtained from the strain gage and the VDS, for comparison. The experimental results showed that the primary natural frequency of the simple beam obtained using the VDS was the same as the value obtained using the strain gage. Lee and Shinozuka [
23,
24] analyzed the natural frequency by measuring the real-time response of a bridge to which a circular marker plate was attached using the VDS and a laser vibrometer, and found that the VDS had sufficient accuracy to measure the dynamic characteristics of the structure. Ji [
25] obtained displacement data by using the corner of a rectangular marker plate in the image. The developed VDS was applied to a cantilever beam and an actual bridge to compare the LVDT and the displacement data, and the developed VDS showed high precision. Park et al. [
26] and Lee et al. [
27] developed a method of measuring the deformation of a building structure; their method can be applied to the high-rise structure by installing cameras and marker plates in the building. They conducted an experiment by comparing the deformation in the structure with the LDS, which was a reference value; they found that the data reliability of the proposed method was very high. Choi et al. [
28] proposed a VDS using a marker plate to measure the dynamic displacement of the structure. In an experiment using the shake table of a large-scale model, they experimentally proved that the dynamic displacement can be precisely measured using the VDS and marker plate. In addition, several researchers [
29,
30,
31,
32,
33,
34,
35,
36,
37,
38] have developed VDS devices for measuring the dynamic displacement of a structure, and verified the reliability of the displacement data obtained from the VDS by comparing these data with the data obtained by the existing sensor for an actual structure (mainly a bridge, which is a civil engineering structure) or the loading experiment of the scale model. In previous studies on VDS, the displacement data were extracted mostly by using a marker. The marker was used to provide the feature points for extracting the displacement data from the image. The VDS proposed by the above researchers has the limitation in that only the displacement data of the part with an attached marker are known, and if the marker falls off from the structure, those methods cannot be applied to obtain the displacement data using the VDS.
The purpose of installing the marker is not only to provide a feature point in the image, but also to calculate the scaling factor that converts the movement of the feature point from the pixel coordinates to the physical coordinates. In other words, if the marker were to be removed, it should be possible to calculate the scaling factor that converts the coordinates of the feature point without markers and a method of extracting the feature point without markers should be available. To solve the problem in which the existing VDS is accompanied by a marker, several works were conducted on extracting the displacement data [
39,
40,
41] from some natural markers such as a rivet or a bolt hole of the structure in the image as feature points, and the dynamic characteristics of the structure were extracted precisely using the displacement data obtained from the image without artificial markers. In these works, a technique that was an extension of digital image correlation (DIC) was introduced to identify the feature points without artificial markers, and the scaling factor was calculated based on the focal length of the camera as well as the distance and angle between the camera and structure. Using this technique, the applicability of the proposed VDS to actual civil structures was proven, but the VDS cannot be used if there is no feature point that serves as a natural marker in the structure. In other words, the existing VDS extracts the displacement data from a natural or artificial feature point within the image depending on the use of a marker, but it has the limitation in that in the absence of a target that can be referred to as a feature point in the structure, the displacement data cannot be extracted. As the basic principle of the VDS transform the light information to the displacement data, external noise such as those attributed to the weather, ground vibration, and air heat haze can affect the accuracy of the displacement data obtained from the VDS. Xu et al. [
42] reported that an error occurred in obtaining the displacement data from the VDS because of the unidentified object. Highly reliable displacement data can be obtained from VDS to consider various noise factors and to find the solutions prior to field test.
In this study, a target-less vision-based displacement sensor (TVDS) that can extract displacement data without a target such as artificial or natural marker within the image is proposed. The method of extracting the displacement data using the proposed TVDS is introduced, and the reliability of the displacement data obtained from TVDS was analyzed through experiments. In addition, the dynamic displacement data obtained from the TVDS and those obtained from the LDS compared through a white-noise test of a three-story scale model using a shake table, and the reliability of the structural dynamic measurement of the TVDS was analyzed by extracting the dynamic characteristics of the structure from the displacement data.
2. Target-Less Vision-Based Displacement Sensor (TVDS)
Figure 1 illustrates the process of obtaining the displacement data from the image using the TVDS. The process largely consists of three steps: step (1) image acquisition and processing; step (2) extraction and tracking of the feature point; and step (3) calibration process. In step 1, an analog image of the actual structure is converted to a digitalized image through a camera. The converted image is imported into a computer, and a region of interest (ROI) is selected to improve the operation speed and to obtain the displacement data of the desired part. Thereafter, the noise in the image is removed through image enhancement for increasing the accuracy of the displacement data. In step 2, image binarization is conducted in the ROI of the selected image, and the feature point is extracted and tracked in the image without a target by using the image convex hull optimization technique for the obtained binary image. In step 3, the pixel coordinates of the feature point obtained in step 2 are converted into physical coordinates using the scaling factor map calculated based on the external environment between the structures and the camera and the location of the feature point within the image in order to obtain the time domain displacement data. The essential aspects of the proposed TVDS is the scaling factor map for converting the pixel coordinates to the physical coordinates and the method of extracting the feature point in the image without targets by using the image convex hull optimization.
2.1. Image Convex Hull Optimization
The results of several studies showed that highly reliable displacement data can be obtained from the image by using the existing VDS with a marker. There is a possibility, however, that the elimination of the marker will make it impossible to extract the displacement data. The alternative method of using natural markers such as the bolt hole of the structure also poses a limitation that the displacement data only for a specific part of the structure can be obtained. The TVDS proposed in this study can be said to be a VDS without a target because it is a method of obtaining the displacement data by extracting the feature point from the shape of the structure without artificial or natural markers referred as the target in the digitized image.
The key principle of the proposed TVDS is to find the feature point in the image using image convex hull optimization. The reason for proposing this method is that if parts such as the bolt hole or a corner of the structure in the image are found as feature points, the applicability of the vision-based sensor to the actual structure becomes lower. Image convex hull can be defined as a convex polygon that contains all the points in the binary image [
43]. It has advantages that ensure the ease of extracting a feature point or a particular shape from an image, and its operation speed is faster [
44]. There exist numerous convex hulls in a single image because the convex hull deals with the binary image determined depending on the threshold value ranging from 0 to 1. If the same convex hull is obtained from all the images by adjusting the threshold value in the continuous image, the structure in the image can be assumed to perform a rigid body motion, and the displacement data will be obtained with the centroid of the convex hull as the feature point. In this study, the feature point in the image was extracted through the optimization problem of the area of the image convex hull, as follows:
where,
is the threshold value in i-th frame,
is the area of image convex hull in i-th frame, and n is number of image frame.
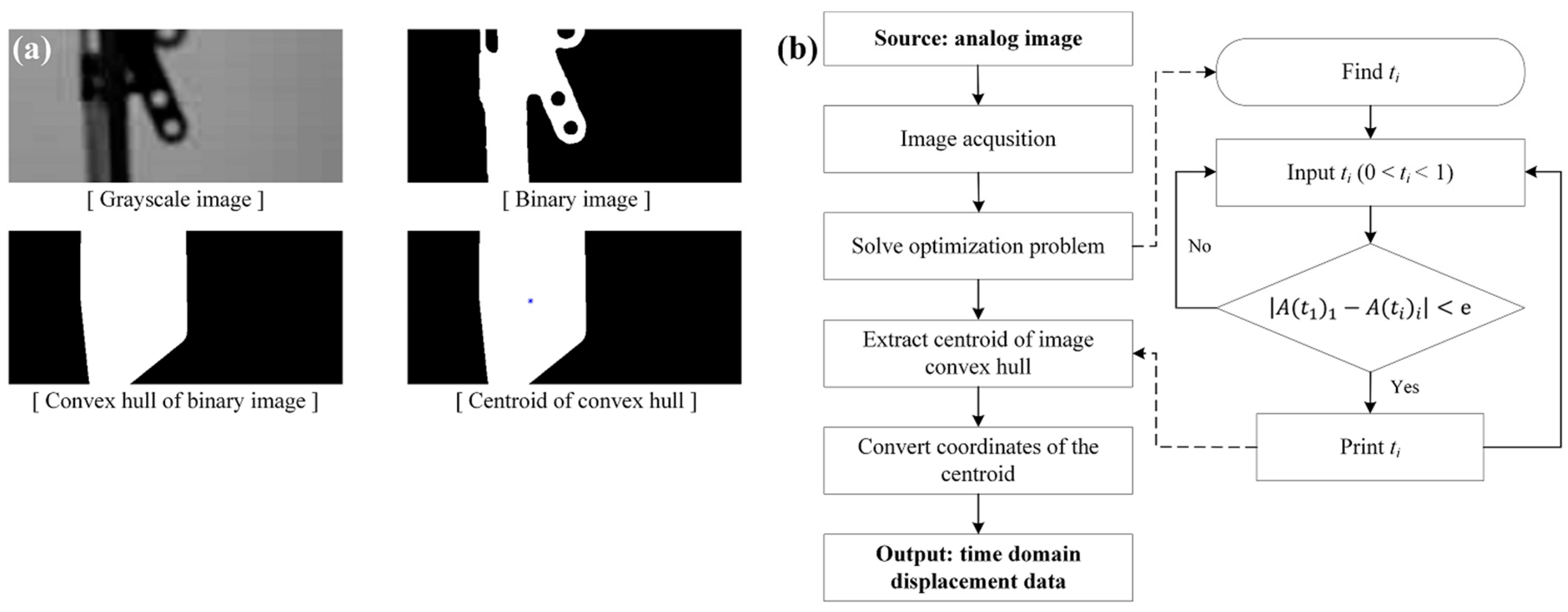
Figure 2a shows examples of the feature point and image convex hull of a structure obtained through the process of the extraction and tracking of the feature point shown in
Figure 1 in the structure images. In the selected ROI of the first frame, image binarization is conducted depending on the threshold value, and the image convex hull that contains all the white portions where the pixel value is 1 can be obtained in the binary image. The centroid is found in the obtained image convex hull, and the point is considered the feature point. Then, the convex hull optimized in the area of the first frame is found for each frame by adjusting the threshold value in each frame with respect to the area of the image convex hull calculated in the first frame in accordance with the flowchart in
Figure 2b. Thereafter, the displacement data are extracted on a per-pixel basis from the changes in the center point of the image convex hull from all the image frames. To convert the extracted displacement data from pixel coordinates to physical coordinates, the scaling factor map proposed in
Section 2.2 is used.
The proposed image convex hull optimization technique may be similar to the DIC technique, which does not require the target, however, the basic principle of the proposed technique differs from that of the DIC technique. The DIC technique provides a way to compare the distribution of the grayscale intensity level between the reference image and the deformed image. The correlation coefficient is defined in accordance with the grayscale intensity level between the two images, and by mapping each pixel, the value of the correlation coefficient is as found to be close to one. The one-by-one mapping of the DIC technique allows measurement of the strain filed, but the technique incurs a high computation cost, while the image convex hull optimization also uses the distribution of the grayscale intensity, the mapping process is not necessary to extract the displacement data from the image. The proposed technique is faster than the DIC technique owing to the omission of the one-by-one mapping, but it is difficult to extract the strain field. Although the proposed technique has a limitation for measuring the strain field, it can be said that the proposed technique is more suitable for measuring the displacement data than the DIC technique. Further, the DIC technique is sensitive to external light sources because the grayscale intensity level of the image is changed in accordance with the intensity of light illumination. The proposed technique extracts a feature point by comparing the shape of image convex hull determined in accordance with the threshold between the reference image and deformed image. Hence, the image noise resulting from the variance of light illumination does not significantly affect the accuracy of the proposed technique unlike in the case of the DIC technique.
As the method of finding the feature point using the image convex hull is to optimize the convex hull area of the first frame, it is available only when there is no deformation of the structure itself in the ROI of the image under the assumption of a plane motion. In the excitation test of the scale model using a shake table that was conducted in this study, no structural deformation or out-of-plane behavior caused by the torsion was observed, but there is a need to improve the algorithm of the proposed TVDS to be able to determine the critical displacement that leads to the collapse of the structure. Moreover, the image convex hull optimization has a limitation in extracting the feature point when large deformation occurs. Because the basic assumption of the image convex hull optimization technique in order to extract the shape of the structure is that the structure behave the rigid body motion (see [
44]), the reliability of the displacement data will be decreased by the non-rigid body motion resulted from a large deformation of the structure. In other words, the image convex hull optimization has a limitation in extracting the feature point when a large deformation occurs.
2.2. Scaling Factor Map
The scaling factor is responsible for converting the pixel coordinates of the feature point to physical coordinates. The scaling factor (
SF1) obtained through a marker is the ratio of the size of the actual marker to the size of the marker in the image, and can be easily obtained as follows:
where,
D1 is the actual diameter of a maker (mm) and
d1 is the diameter of a maker in the image plane (pixel).
If artificial marker is not used, the scaling factor (
SF2) can be calculated from pixel pitch
R of a camera sensor, focal length of
f, and distance of
Z between the camera and the target, as shown below:
In theory,
SF1, which uses the size of the marker, and
SF2, which uses the external conditions of the object and the camera, should be the same. However, experimental results showed that as the marker becomes more distant from the center of the image plane, a significant error occurs between the two scaling factors. Although Feng et al. [
38] proposed the scaling factor determined by the distance and the angle between the camera and the target, and the angle for converting pixel coordinates to physical coordinates without a marker, an error occurred in the results obtained by comparing only the theoretical values, not the experimental ones in this study.
Figure 3 is a graphical representation of the relationship between the camera and the target. It shows that the distance between the camera and the target obtained through camera changes depending on the position within the image (or the position of the actual target), whereas the focal length is constant. That is, as shown in
Figure 3, the more distant a marker or an object from the center of the image plane, the greater is the distance
Z from the camera, and therefore, adequate calibration process is required. The scaling factor map, in which the calculation of the scaling factor varies depending on the pixel coordinates in the image plane of the object can be obtained using the following equations:
where,
is the distance,
cx and
cy is center pixel of image plane, and SFM is scaling factor map.
The image correction method is needed to obtain reliable displacement data from the image convex hull optimization in the case of short focal length and small distance between the camera and structure. Generally, affine transformation or homography transformation should be used to compensate the distorted image. As we assumed that the structure has no target, it is hard to use the typical image correction methods using the target points. The image correction was automatically performed by the coordinate transformation using the proposed scaling factor map, because the scaling factors varied in accordance with the location of the feature point obtained from the image convex hull optimization without the target as well as the external environments such as the focal length and distance. At the end of this section, the results of the marker plate test to estimate the actual size of marker are summarized in accordance with the distance and angle, which may cause image distortion.
The camera used in this study was a Nikon D5500 (full-HD, 60 fps), and a wide-angle lens of F-mount with an 18–55 mm focal length. At full HD (1920 × 1080 pixels), the
cx and
cy values are 960 and 540, respectively. The R value refers to the size of the actual sensor that one pixel occupies in the image plane as a pixel pitch, and in video shooting with Nikon D5500, the
R value is 12.24 μm.
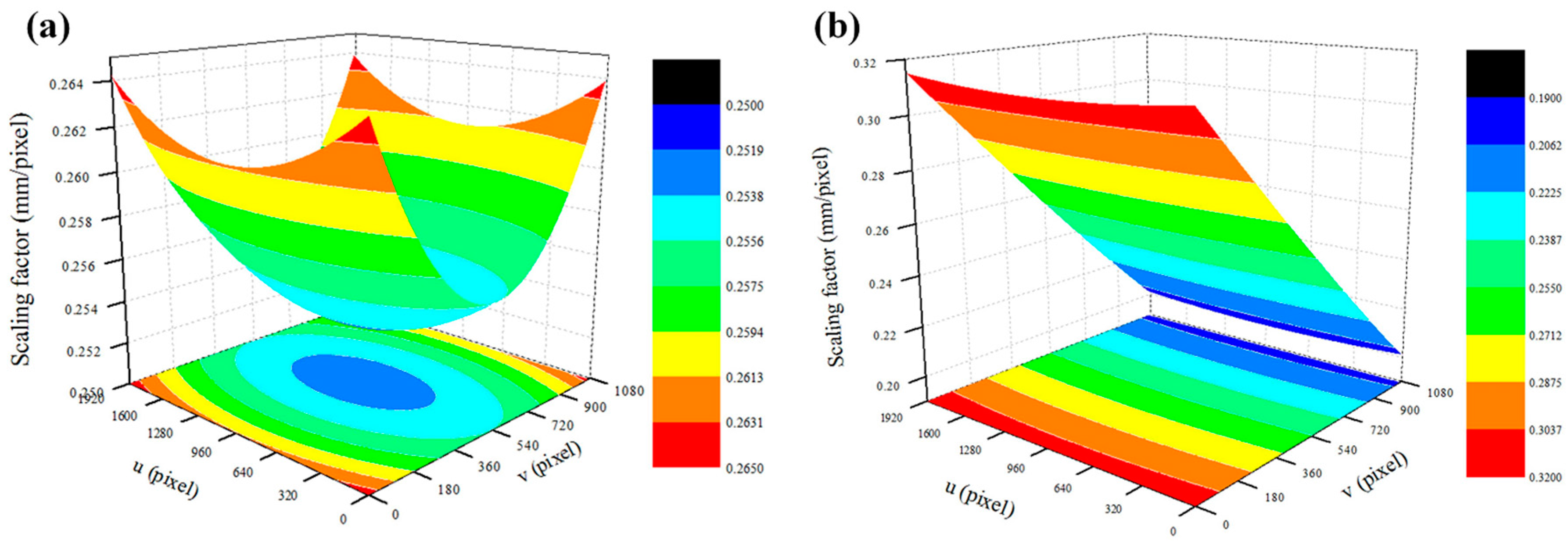
Figure 4 shows a scaling factor map in the same external environment, in which only the angle between the camera and the target is different. As shown in
Figure 4, the pixel coordinates of the feature point can be converted to physical coordinates through the scaling factor map, which is calculated differently depending on the pixel coordinates of the feature point.
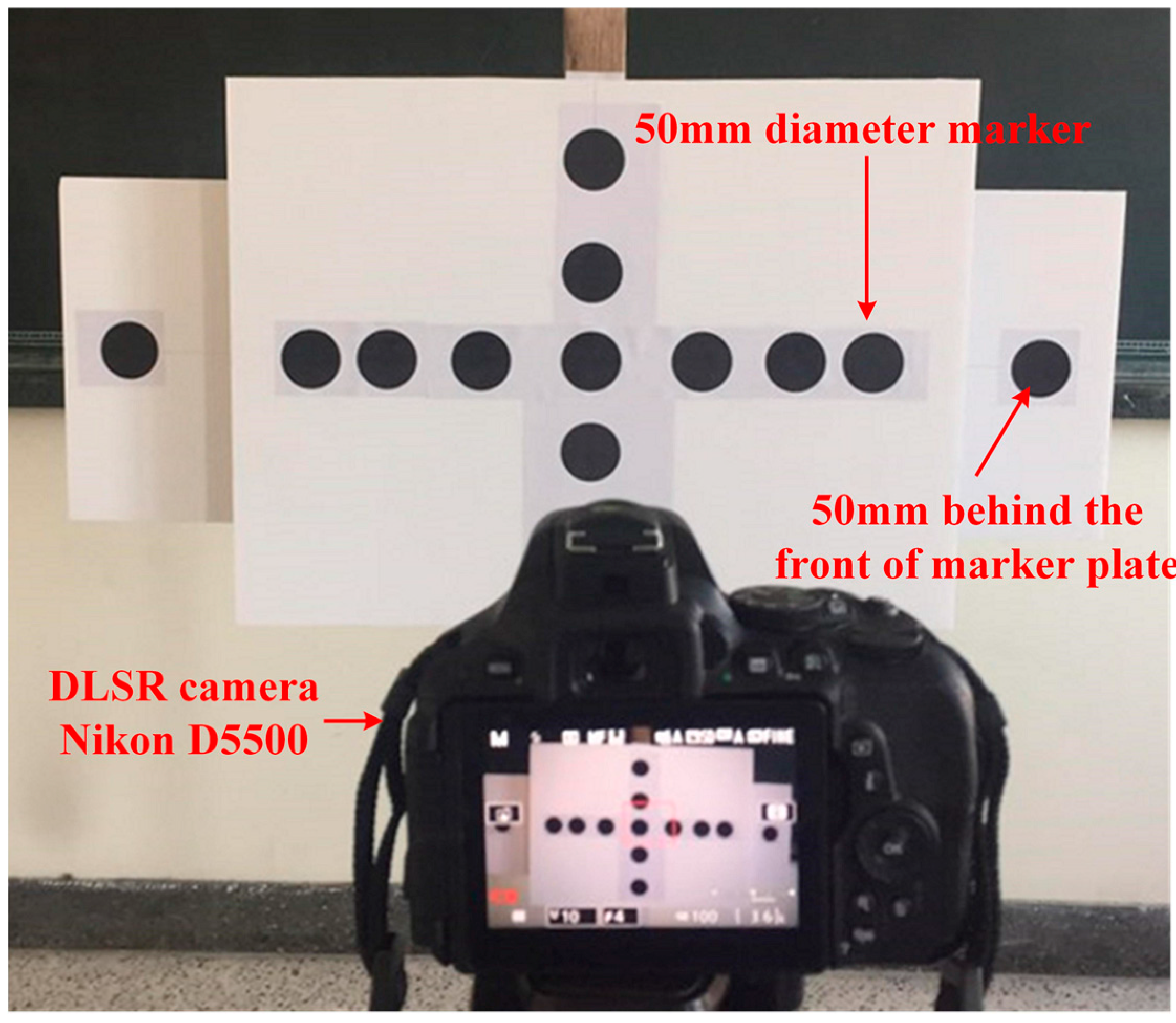
In order to verify the scaling factor map that is related to the data accuracy of the TVDS, a marker plate with a thirteen of 50 mm-diameter markers was installed in front of a camera as shown in
Figure 5, and the
SF1 and
SF2 values obtained from the size of marker and the scaling factor map, respectively, were compared. The markers at both ends of the right and left sides were located 50 mm behind from the front markers, and for the experiment, the distance between the camera and the marker was increased by 930 mm, up to 930–3720 mm, and the angle between the camera and the marker plate was increased by 10°, up to 0°–60°. The distance and the angle are the variables to affect the image distortion, which make difficult to estimate the actual size of marker using the
SF2 obtained from the scaling factor map.
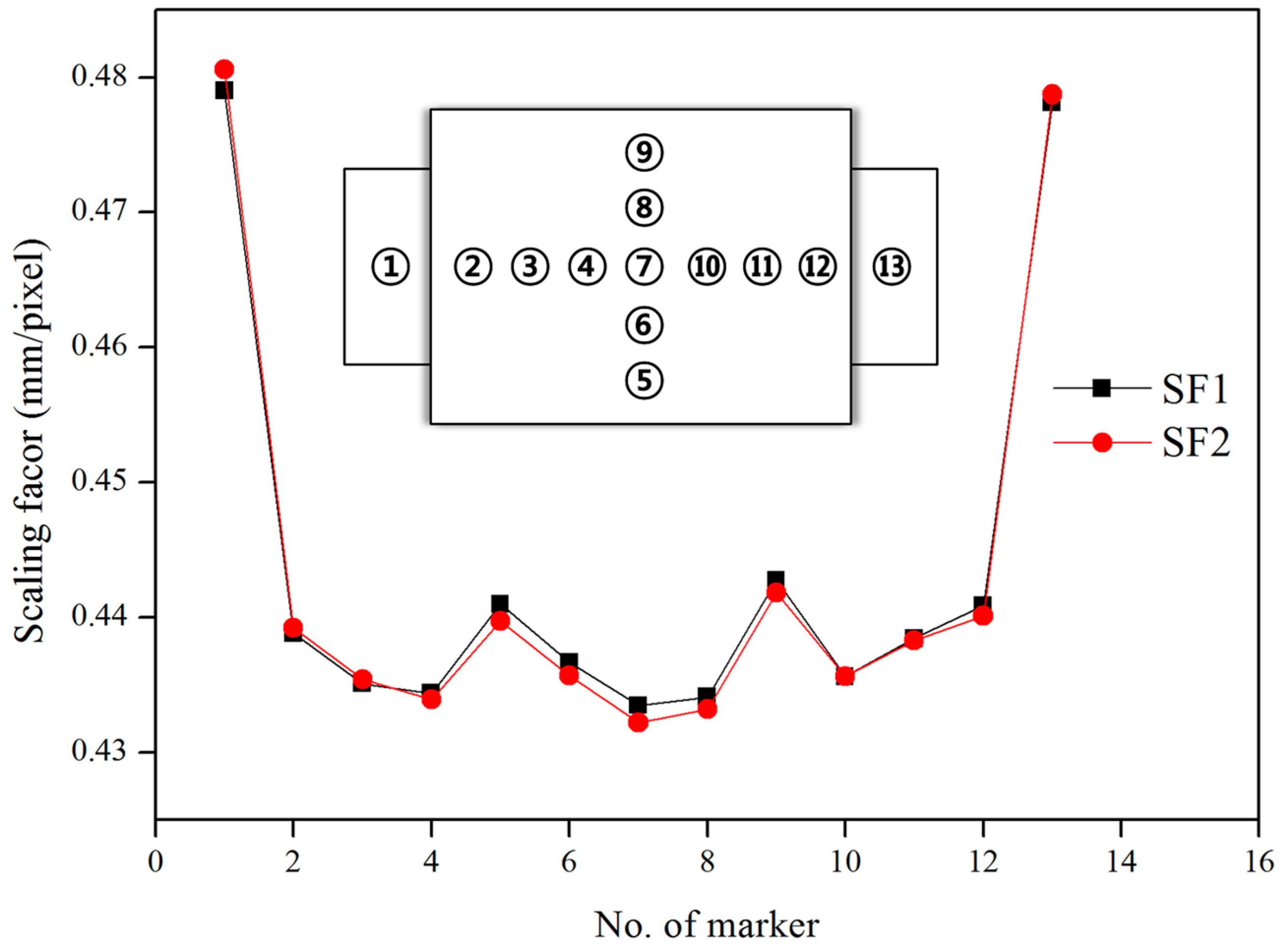
Figure 6 shows a graph that compares the difference between the
SF1 and
SF2 values at distance = 930 mm, angle = 0, and focal length = 45 mm when the error was approximately 0.36%, and the diameter difference of the marker was 0.09 mm. These results imply that the image distortion was resolved through the scaling factor map despite the short distance.
Figure 7 is a graph showing the maximum error of
SF2 according to the distance and the angle, and it can be seen that the error in the distance was low, but it increased greatly with an increase in the angle. When the angle was constant, the difference in diameter with the actual marker with an increase in the distance ranged from 0.03 to 0.11 mm. This indicates that the error is not governed by the distance. When the distance was constant, however, the diameter difference with the actual marker ranged from 1.41 to 1.47 mm, showing a larger difference compared to the distance. The results of the marker plate test showed that the image distortion caused by the angle between the camera and the object plane is significantly effect on the data accuracy, and the proposed scaling factor has the limitation that compensation for the distorted image is necessary when the angle is larger than 30°. Based on these results, the angle between the camera and the structure was reduced to less than 10° in order to reduce the error due to external factors.
3. Experimental Test Set-Up
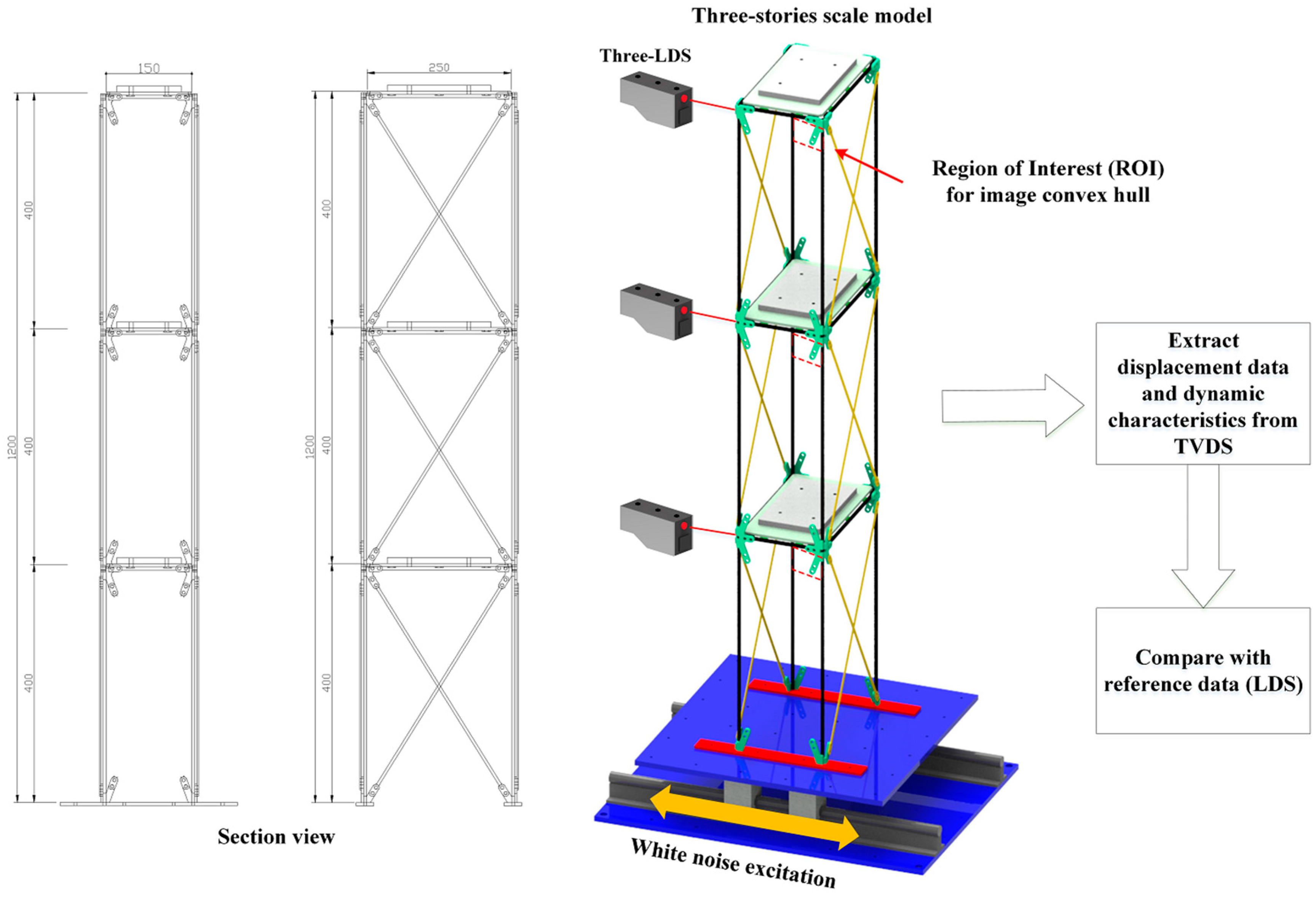
A three-story scaled model test was conducted using a shake table (QuanserShake Table II, Quanser Consulting Inc., Markham, ON, Canada) in order to measure the dynamic displacement through the proposed TVDS. The dynamic displacement of the scaled model was measured using the TVDS and LDS. The displacement data obtained from the LDS were used as reference data to verify the displacement data reliability of the TVDS.
Figure 8 shows the details of the scaled model and the shake table excitation experiment.
Because the proposed TVDS employs a camera and extracts the shape of the structure by the image convex hull optimization to measure the displacement of the scaled model, the reliability of the displacement data will decrease in the event of out-of-plane behavior. The displacement data could be extracted using a camera despite the out-of-plane behavior if homography transformation is applied and the camera is installed at an angle to the moving plane of the structure. However, the image convex hull optimization used in this study has a limitation in extracting the points required for the transformation. Hence, an X-shape brace was installed in a longitudinal direction of the scaled model to prevent the out-of-plane behavior of the scaled model. The member and materials properties of the scaled model are summarized in
Table 1.
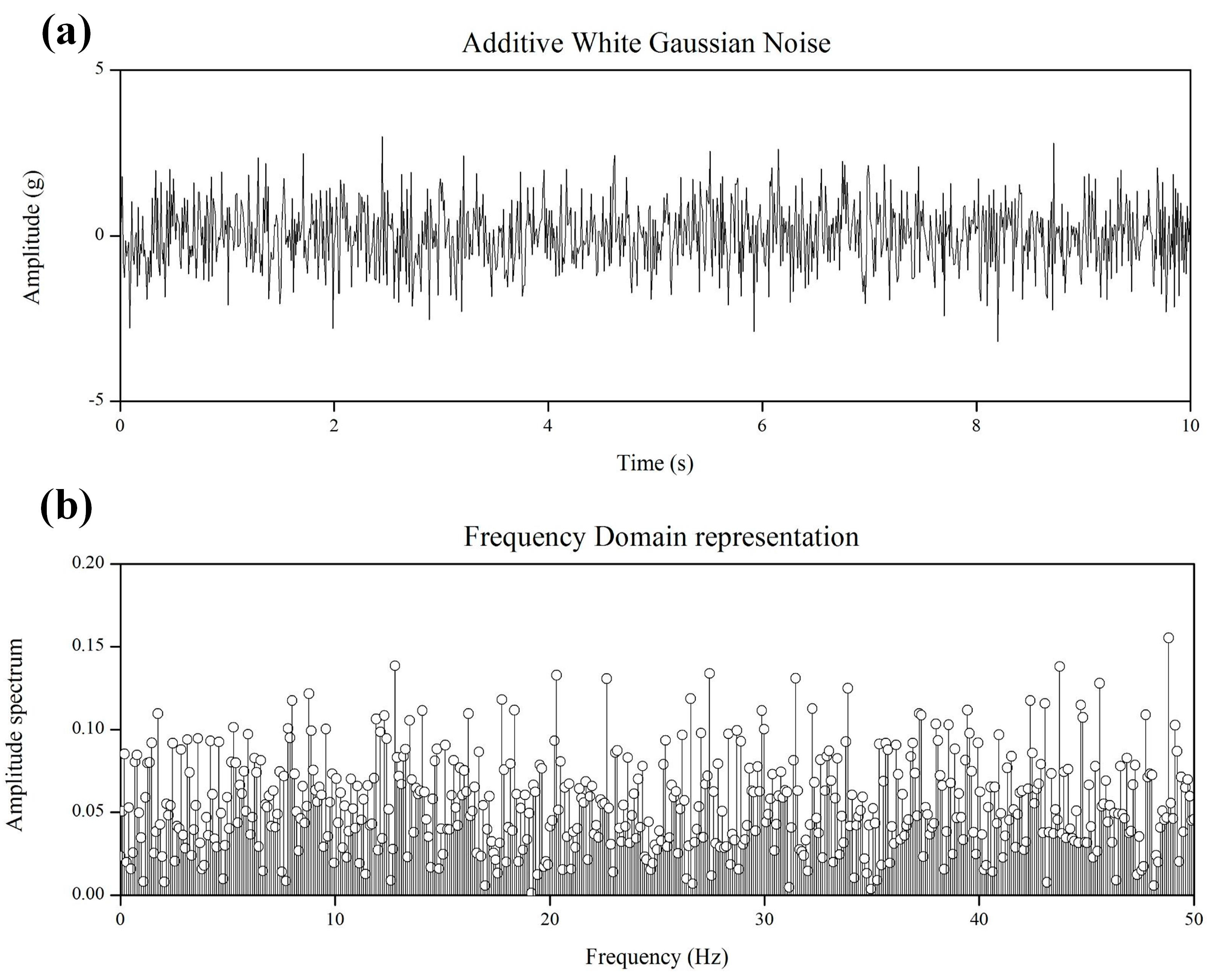
The weight of the mass plate of each floor was approximately 2.0 kg, and the total mass of the scaled model was approximately 9.08 kg. To facilitate the detection of the dynamic characteristics of the structure from the obtained displacement data, a load was applied to the specimen with a 50-Hz-bandwidth white noise, as shown in
Figure 9. White noise was generated using MATLAB, and the white noise generated up to 0–50 Hz included a total of 513 frequency components at 0.0977 Hz intervals.
The TVDS extracted feature points by optimizing the area of the image convex hull obtained on the first frame, with the right side of the scaled model as the ROI. The distance between the camera and the scaled model was 1300 mm, the focal length was 18 mm, and the angle was 3°. From these external environments, the calculated scaling factor in the center position of the image was found to be 0.8840 mm/pixel. The image of the scaled model was captured with the Nikon camera at 1920 × 1080 (2.0 megapixels) and 60 fps.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}