Using Deep Learning to Identify Utility Poles with Crossarms and Estimate Their Locations from Google Street View Images

 , ,
, ,
Abstract
:1. Introduction
2. Data
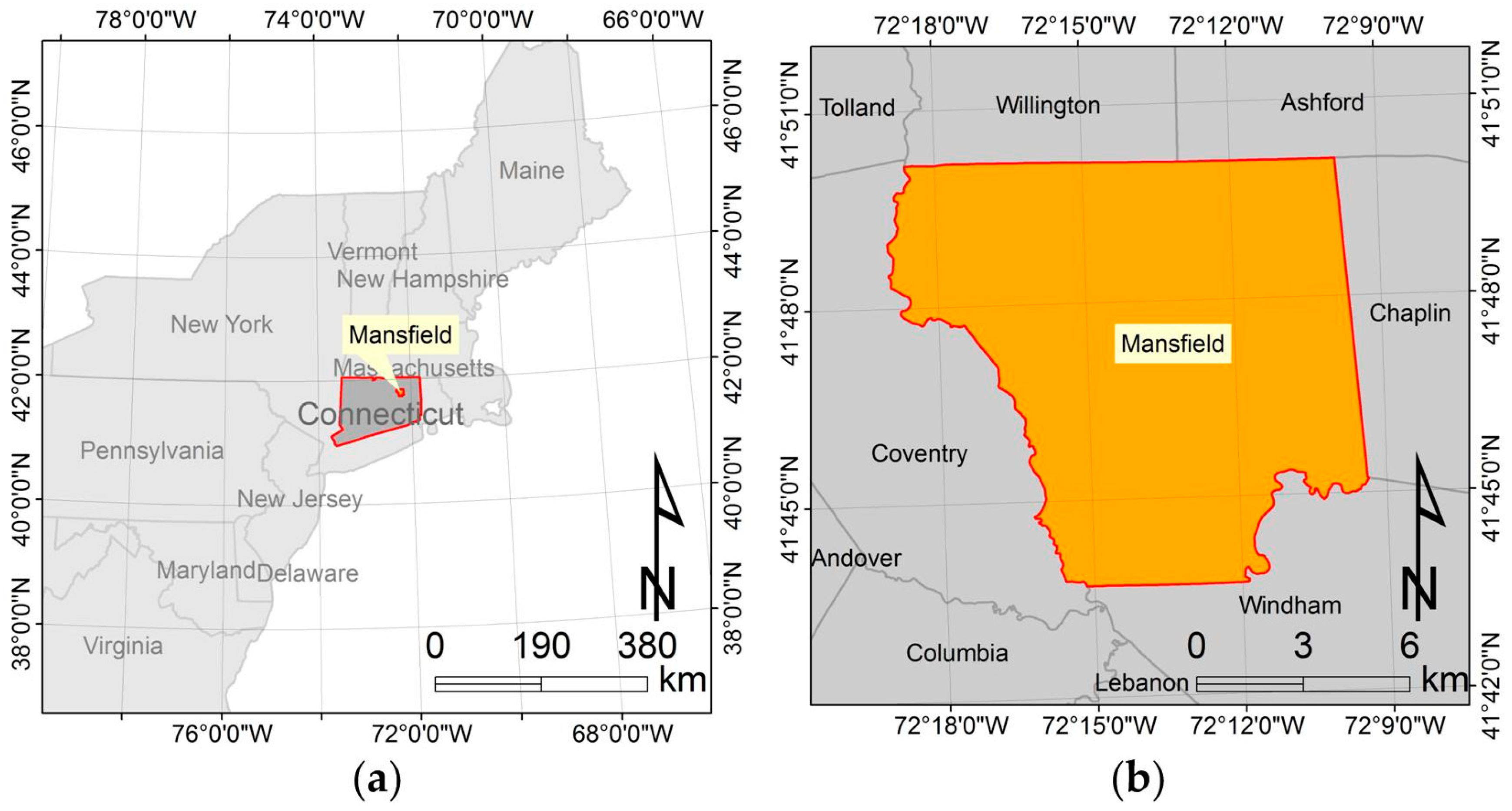
2.1. Study Area and GIS Data
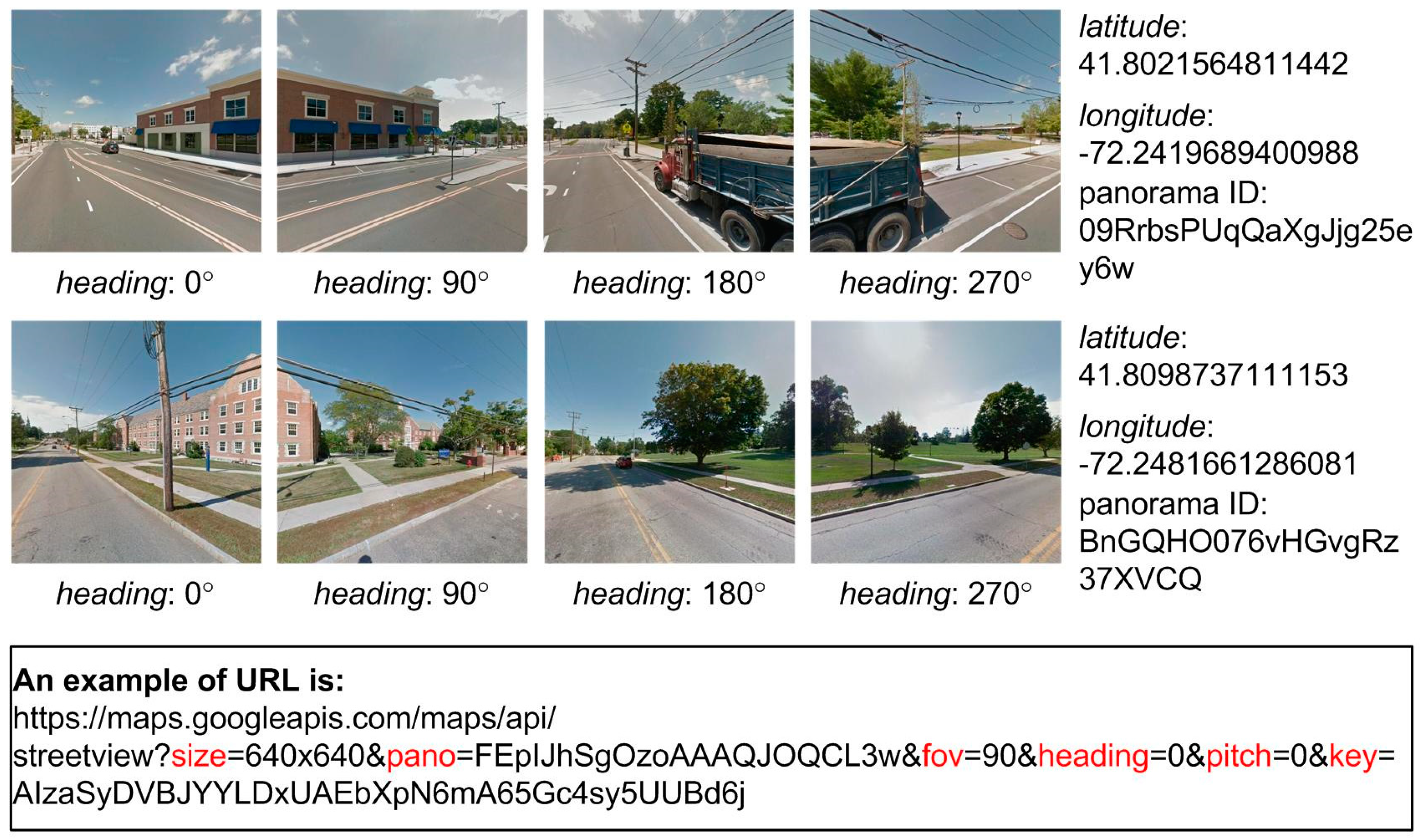
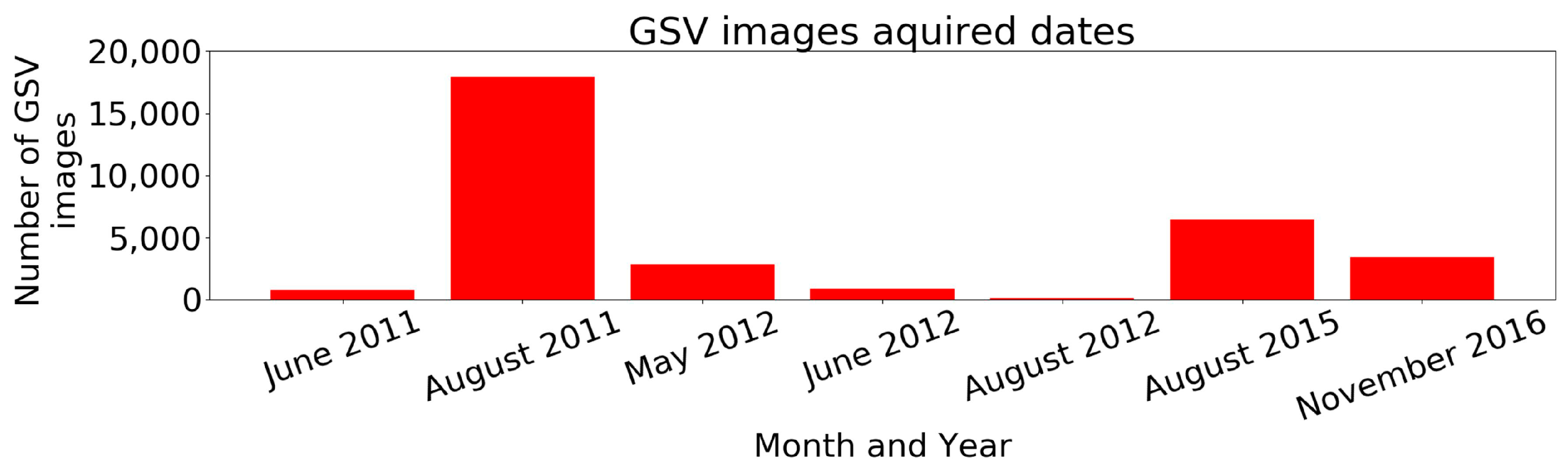
2.2. Google Street View Imagery
2.3. Annotation Data
3. Methodology
3.1. General Procedure
3.2. Deep Learning Algorithm
3.3. Utility Poles Position Inference
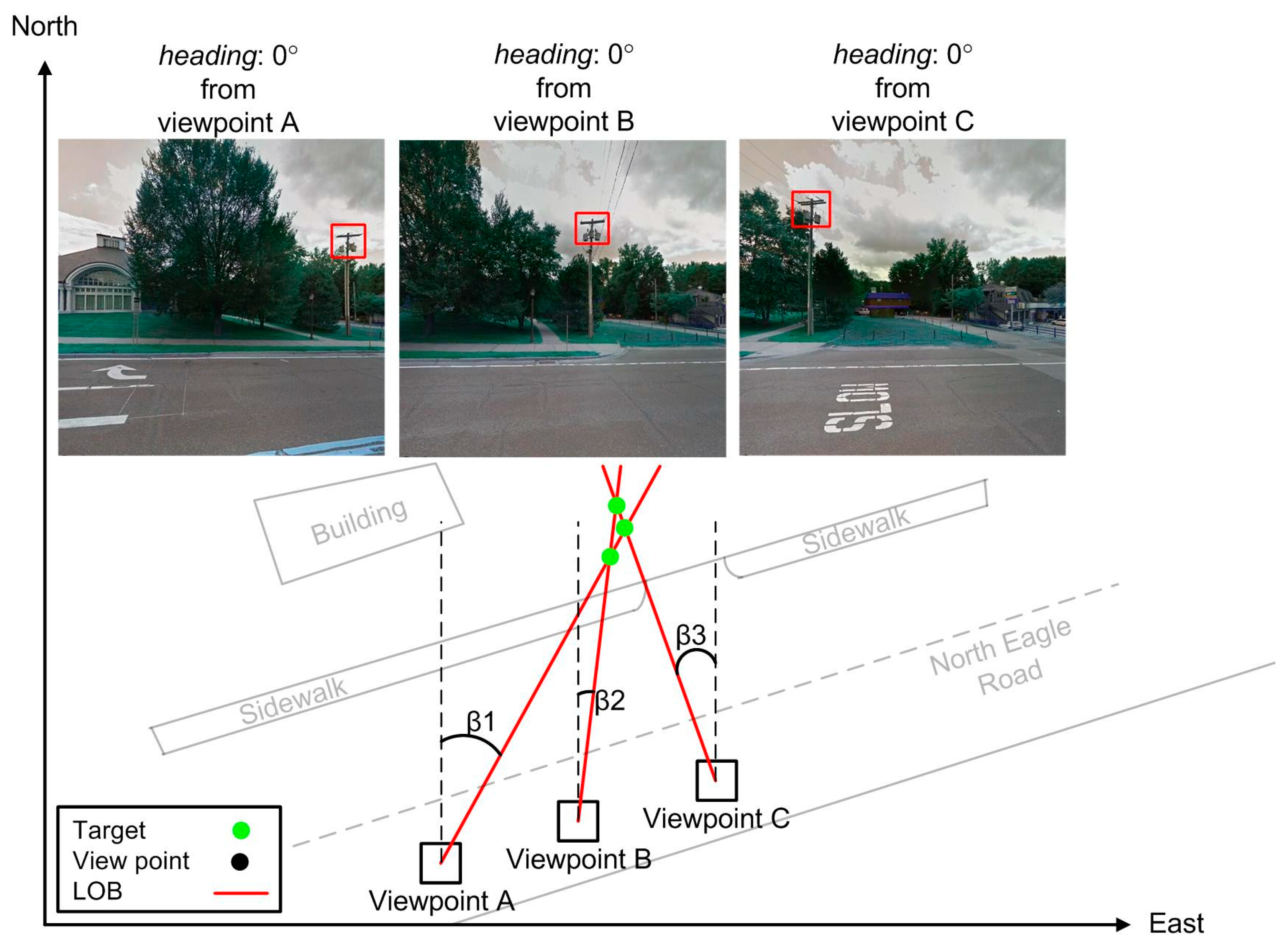
3.3.1. LOB Measurement
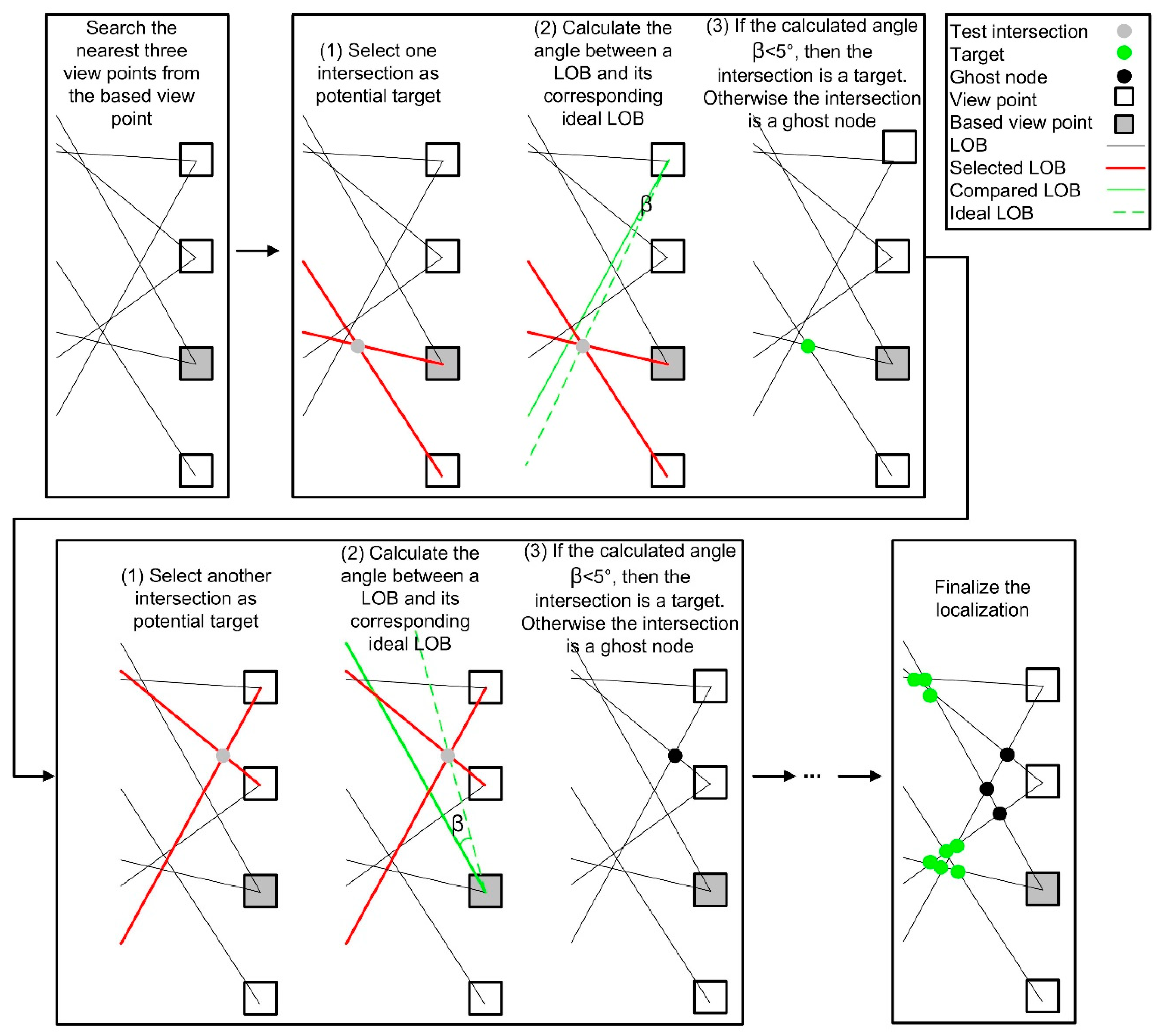
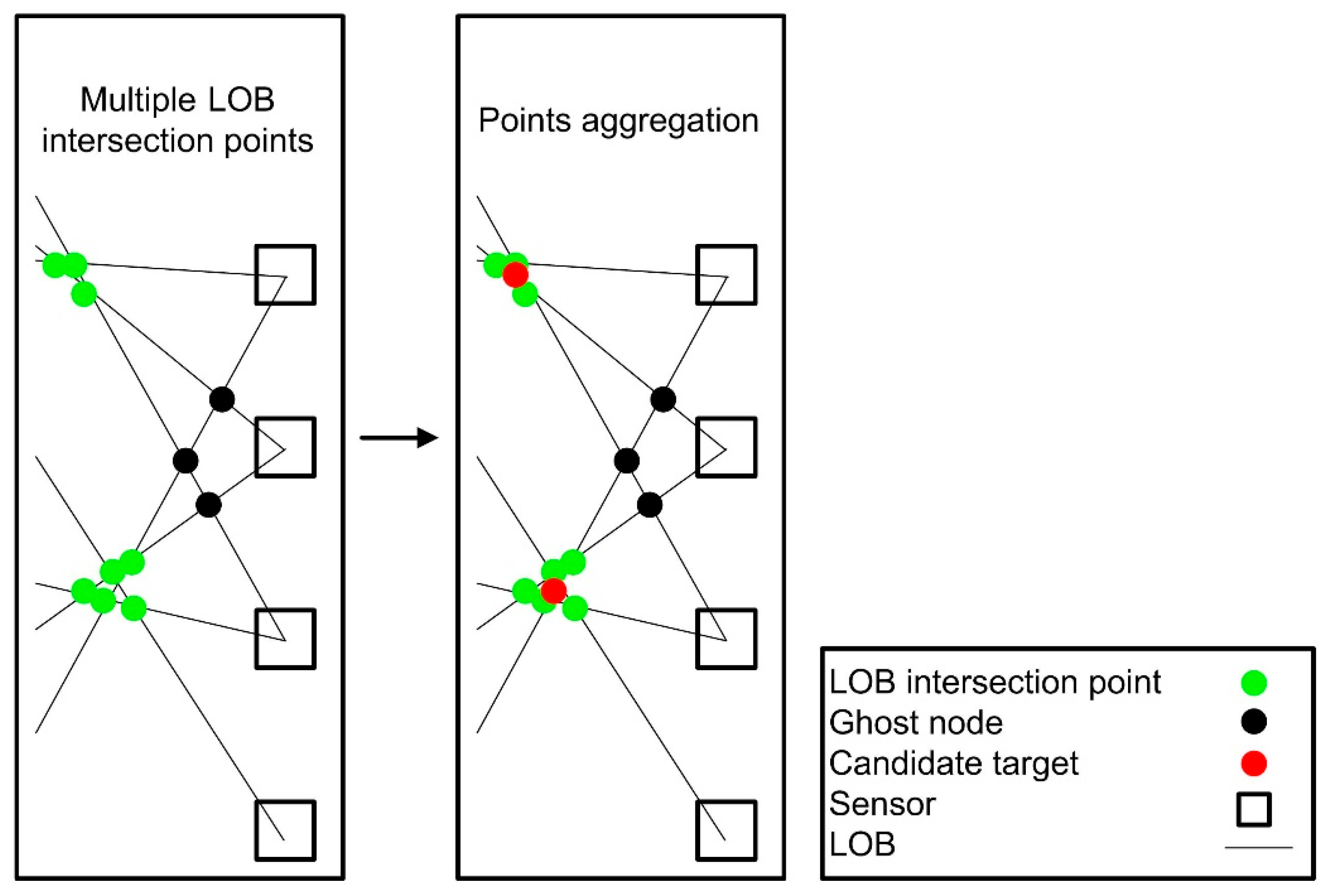
3.3.2. Multiple LOB Intersection Points Aggregation
4. Experiments and Results
4.1. Experiments
4.2. Results and Discussions
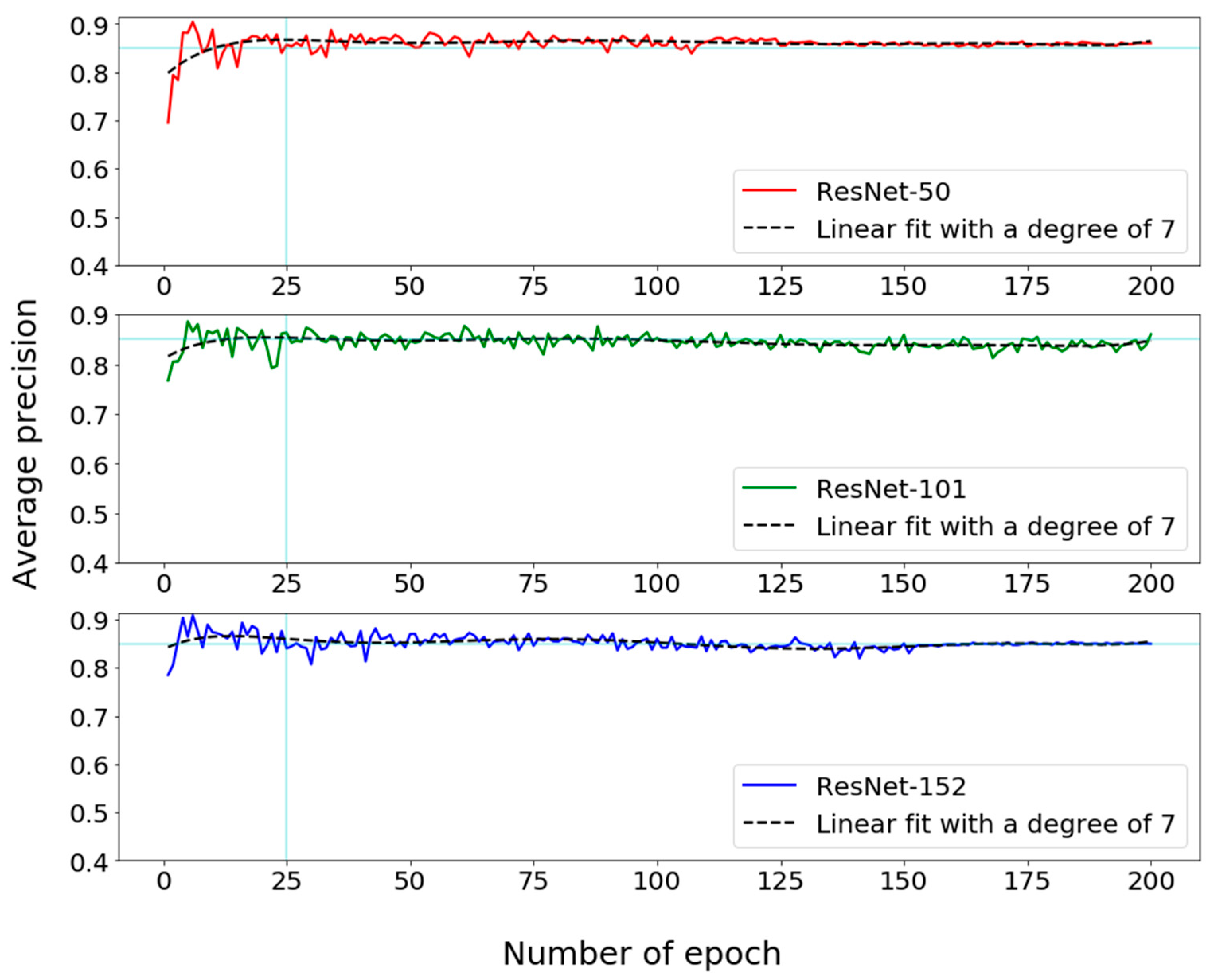
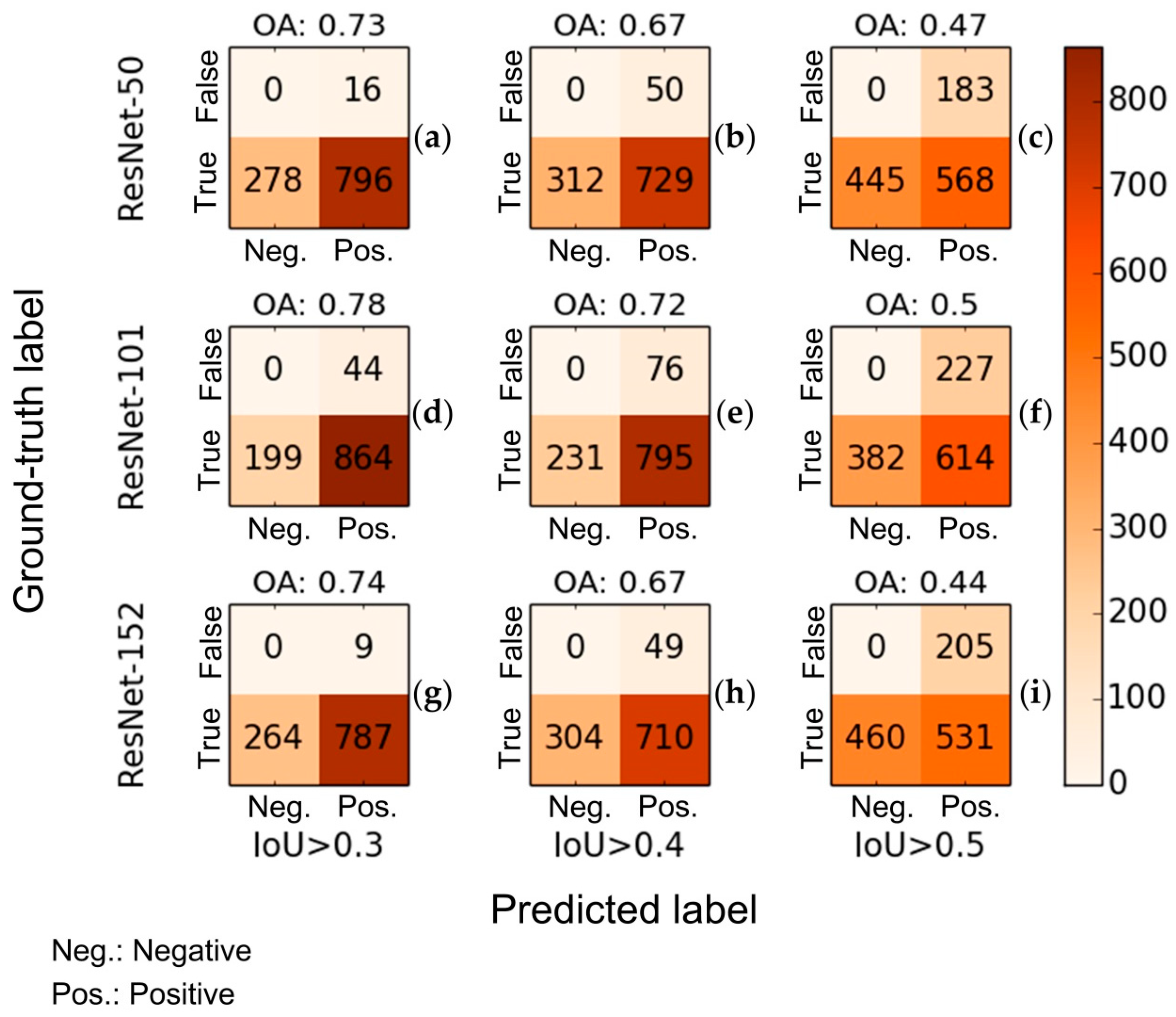
4.2.1. Accuracy Assessment of Object Detection
4.2.2. Accuracy Assessment of Location Estimation
4.2.3. Parameter Sensitivity Analysis of Location Estimation
4.2.4. Limitations and Future Studies
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nagura, S.; Masumoto, T.; Endo, K.; Wakasa, F.; Watanabe, S.; Ikeda, K. Development of mapping system for distribution facility management. In Electricity Distribution, Proceedings of 10th International Conference on Electricity Distribution, CIRED 1989, Brighton, UK, 8–12 May 1989; IET: London, UK, 1989. [Google Scholar]
- Nguyen, V.N.; Jenssen, R.; Roverso, D. Automatic autonomous vision-based power line inspection: A review of current status and the potential role of deep learning. Int. J. Electr. Power Energy Syst. 2018, 99, 107–120. [Google Scholar] [CrossRef]
- CITYLAB. Available online: https://www.citylab.com/environment/2017/10/how-open-source-mapping-helps-hurricane-recovery/542565/ (accessed on 1 February 2018).
- Cetin, B.; Bikdash, M.; McInerney, M. Automated electric utility pole detection from aerial images. In Proceedings of the IEEE Southeastcon 2009, Atlanta, GA, USA, 5–8 March 2009. [Google Scholar] [CrossRef]
- Bernstein, R.; Di Gesù, V.A. combined analysis to extract objects in remote sensing images. Pattern Recognit. Lett. 1999, 20, 1407–1414. [Google Scholar] [CrossRef]
- Golightly, I.; Jones, D. Corner detection and matching for visual tracking during power line inspection. Image Vis. Comput. 2003, 21, 827–840. [Google Scholar] [CrossRef]
- Jones, D.I.; Whitworth, C.C.; Earp, G.K.; Duller, A.W.G. A laboratory test-bed for an automated power line inspection system. Control Eng. Pract. 2005, 13, 835–851. [Google Scholar] [CrossRef]
- Khawaja, A.H.; Huang, Q.; Khan, Z.H. Monitoring of Overhead Transmission Lines: A Review from the Perspective of Contactless Technologies. Sens. Imaging 2017, 18, 24. [Google Scholar] [CrossRef]
- Li, W.H.; Tajbakhsh, A.; Rathbone, C.; Vashishtha, Y. Image processing to automate condition assessment of overhead line components. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010. [Google Scholar] [CrossRef]
- Tong, W.G.; Li, B.S.; Yuan, J.S.; Zhao, S.T. Transmission line extraction and recognition from natural complex background. In Proceedings of the 2009 International Conference on Machine Learning and Cybernetics, Baoding, China, 12–15 July 2009. [Google Scholar] [CrossRef]
- Whitworth, C.C.; Duller, A.W.G.; Jones, D.I.; Earp, G.K. Aerial video inspection of overhead power lines. Power Eng. J. 2001, 15, 25–32. [Google Scholar] [CrossRef]
- Yan, G.; Li, C.; Zhou, G.; Zhang, W.; Li, X. Automatic extraction of power lines from aerial images. IEEE Geosci. Remote Sens. Lett. 2007, 4, 387–391. [Google Scholar] [CrossRef]
- Sarabandi, K.; Pierce, L.; Oh, Y.; Ulaby, F.T. Power lines: Radar measurements and detection algorithm for polarimetric SAR images. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 632–643. [Google Scholar] [CrossRef]
- Sarabandi, K.; Park, M. Extraction of power line maps from millimeter-wave polarimetric SAR images. IEEE Trans. Antennas Propag. 2000, 48, 1802–1809. [Google Scholar] [CrossRef] [Green Version]
- Jwa, Y.; Sohn, G. A piecewise catenary curve model growing for 3D power line reconstruction. Photogramm. Eng. Remote Sens. 2012, 78, 1227–1240. [Google Scholar] [CrossRef]
- Kim, E.; Medioni, G. Urban scene understanding from aerial and ground LIDAR data. Mach. Vis. Appl. 2011, 22, 691–703. [Google Scholar] [CrossRef]
- Kim, H.B.; Sohn, G. Point-based classification of power line corridor scene using random forests. Photogramm. Eng. Remote Sens. 2013, 79, 821–833. [Google Scholar] [CrossRef]
- McLaughlin, R.A. Extracting transmission lines from airborne LIDAR data. IEEE Geosci. Remote Sens. Lett. 2006, 3, 222–226. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Q.; Liu, L.; Zheng, D.; Li, C.; Li, K. Supervised Classification of Power Lines from Airborne LiDAR Data in Urban Areas. Remote Sens. 2017, 9, 771. [Google Scholar] [CrossRef]
- Sun, C.; Jones, R.; Talbot, H.; Wu, X.; Cheong, K.; Beare, R.; Buckley, M.; Berman, M. Measuring the distance of vegetation from powerlines using stereo vision. ISPRS J. Photogramm. Remote Sens. 2006, 60, 269–283. [Google Scholar] [CrossRef]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef]
- Moore, A.J.; Schubert, M.; Rymer, N. Autonomous Inspection of Electrical Transmission Structures with Airborne UV Sensors-NASA Report on Dominion Virginia Power Flights of November 2016. NASA/TM-2017-219611, L-20808, NF1676L-26882, Nasa Technical Reports Server; Document ID: 20170004692; 1 May 2017. Available online: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20170004692.pdf (accessed on 12 February 2017).
- Oh, J.; Lee, C. 3D power line extraction from multiple aerial images. Sensors 2017, 17, 2244. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yuan, X.; Li, W.; Chen, S. Automatic Power Line Inspection Using UAV Images. Remote Sens. 2017, 9, 824. [Google Scholar] [CrossRef]
- Zhu, L.; Hyyppä, J. Fully-automated power line extraction from airborne laser scanning point clouds in forest areas. Remote Sens. 2014, 6, 11267–11282. [Google Scholar] [CrossRef]
- Cabo, C.; Ordoñez, C.; García-Cortés, S.; Martínez, J. An algorithm for automatic detection of pole-like street furniture objects from Mobile Laser Scanner point clouds. ISPRS J. Photogramm. Remote Sens. 2014, 87, 47–56. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of vertical pole-like objects in a road environment using vehicle-based laser scanning data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Cheng, L.; Tong, L.; Wang, Y.; Li, M. Extraction of urban power lines from vehicle-borne LiDAR data. Remote Sens. 2014, 6, 3302–3320. [Google Scholar] [CrossRef]
- Guan, H.; Yu, Y.; Li, J.; Ji, Z.; Zhang, Q. Extraction of power-transmission lines from vehicle-borne lidar data. Int. J. Remote Sens. 2016, 37, 229–247. [Google Scholar] [CrossRef]
- Sharma, H.; Adithya, V.; Dutta, T.; Balamuralidhar, P. Image Analysis-Based Automatic Utility Pole Detection for Remote Surveillance. In Proceedings of the 2015 International Conference on Digital Image Computing: Techniques and Applications (DICTA), Adelaide, Australia, 23–25 November 2015. [Google Scholar] [CrossRef]
- Anguelov, D.; Dulong, C.; Filip, D.; Frueh, C.; Lafon, S.; Lyon, R.; Ogale, A.; Vincent, L.; Weaver, J. Google street view: Capturing the world at street level. Computer 2010, 43, 32–38. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W.; Ricard, R.; Meng, Q.; Zhang, W. Assessing street-level urban greenery using Google Street View and a modified green view index. Urban For. Urban Green. 2015, 14, 675–685. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W.; Kuzovkina, Y.A.; Weiner, D. Who lives in greener neighborhoods? The distribution of street greenery and its association with residents’ socioeconomic conditions in Hartford, Connecticut, USA. Urban For. Urban Green. 2015, 14, 751–759. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W. Building block level urban land-use information retrieval based on Google Street View images. GIsci. Remote Sens. 2017, 54, 819–835. [Google Scholar] [CrossRef]
- Zhang, W.; Li, W.; Zhang, C.; Hanink, D.M.; Li, X.; Wang, W. Parcel-based urban land use classification in megacity using airborne LiDAR, high resolution orthoimagery, and Google Street View. Comput. Environ. Urban Syst. 2017, 64, 215–228. [Google Scholar] [CrossRef]
- Li, X.; Ratti, C.; Seiferling, I. Quantifying the shade provision of street trees in urban landscape: A case study in Boston, USA, using Google Street View. Landsc. Urban Plan. 2018, 169, 81–91. [Google Scholar] [CrossRef]
- Cheng, W.; Song, Z. Power pole detection based on graph cut. In Proceedings of the 2008 Congress on Image and Signal Processing, Sanya, China, 27–30 May 2008. [Google Scholar] [CrossRef]
- Murthy, V.S.; Gupta, S.; Mohanta, D.K. Digital image processing approach using combined wavelet hidden Markov model for well-being analysis of insulators. IET Image Process. 2011, 5, 171–183. [Google Scholar] [CrossRef]
- Barranco-Gutiérrez, A.I.; Martínez-Díaz, S.; Gómez-Torres, J.L. An Approach for Utility Pole Recognition in Real Conditions. In Proceedings of the Image and Video Technology—PSIVT 2013 Workshops, Guanajuato, Mexico, 28–29 October 2013; Huang, F., Sugimoto, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Song, B.; Li, X. Power line detection from optical images. Neurocomputing 2014, 129, 350–361. [Google Scholar] [CrossRef]
- Mills, S.J.; Castro, M.P.G.; Li, Z.; Cai, J.; Hayward, R.; Mejias, L.; Walker, R.A. Evaluation of aerial remote sensing techniques for vegetation management in power-line corridors. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3379–3390. [Google Scholar] [CrossRef] [Green Version]
- Buduma, N.; Locascio, N. Fundamentals of Deep Learning: Designing Next-Generation Machine Intelligence Algorithms, 1st ed.; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2017; ISBN 1491925612. [Google Scholar]
- Géron, A. Hands-On Machine Learning with Scikit-Learn and TensorFlow: Concepts, Tools, and Techniques to Build Intelligent Systems, 1st ed.; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2017; ISBN 1491962291. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A.; Bengio, Y. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; ISBN 0262035618. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Patterson, J.; Gibson, A. Deep Learning: A Practitioner’s Approach, 1st ed.; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2017; ISBN 1491914254. [Google Scholar]
- Nordeng, I.E.; Hasan, A.; Olsen, D.; Neubert, J. DEBC Detection with Deep Learning. In Proceedings of the 20th Scandinavian Conference on Image Analysis, Tromsø, Norway, 12–14 June 2017; Puneet, S., Filippo Maria, B., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. arXiv, 2017; arXiv:1708.02002v2. [Google Scholar]
- Google. Available online: https://developers.google.com/maps/documentation/streetview/intro (accessed on 15 February 2018).
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Advances in Neural Information Processing Systems 28; Cortes, C., Lawrence, N.D., Lee, D.D., Sugiyama, M., Garnett, R., Eds.; Neural Information Processing Systems Foundation, Inc.: Montréal, QC, Canada, 2015. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef]
- Timofte, R.; Van Gool, L. Multi-view manhole detection, recognition, and 3D localisation. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011. [Google Scholar] [CrossRef]
- Soheilian, B.; Paparoditis, N.; Vallet, B. Detection and 3D reconstruction of traffic signs from multiple view color images. ISPRS J. Photogramm. Remote Sens. 2013, 77, 1–20. [Google Scholar] [CrossRef]
- Hebbalaguppe, R.; Garg, G.; Hassan, E.; Ghosh, H.; Verma, A. Telecom Inventory management via object recognition and localisation on Google Street View Images. In Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision (WACV) (2017), Santa Rosa, CA, USA, 24–31 March 2017. [Google Scholar] [CrossRef]
- Krylov, V.A.; Kenny, E.; Dahyot, R. Automatic Discovery and Geotagging of Objects from Street View Imagery. Remote Sens. 2018, 10, 661. [Google Scholar] [CrossRef]
- Gavish, M.; Weiss, A.J. Performance analysis of bearing-only target location algorithms. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 817–828. [Google Scholar] [CrossRef]
- Zhang, H.; Jing, Z.; Hu, S. Localization of Multiple Emitters Based on the Sequential PHD Filter. Signal Process. 2010, 90, 34–43. [Google Scholar] [CrossRef]
- Reed, J.D.; da Silva, C.R.; Buehrer, R.M. Multiple-source localization using line-of-bearing measurements: Approaches to the data association problem. In Proceedings of the MILCOM 2008—2008 IEEE Military Communications Conference, San Diego, CA, USA, 16–19 November 2008. [Google Scholar] [CrossRef]
- Grabbe, M.T.; Hamschin, B.M.; Douglas, A.P. A measurement correlation algorithm for line-of-bearing geo-location. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013. [Google Scholar] [CrossRef]
- Tan, K.; Chen, H.; Cai, X. Research into the algorithm of false points elimination in three-station cross location. Shipboard Electron. Countermeas. 2009, 32, 79–81. [Google Scholar] [CrossRef]
- Reed, J. Approaches to Multiple-Source Localization and Signal Classification. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 5 May 2009. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Views | Threshold of Angle (°) | Threshold of Distance to Center of Selected Road (m) | Percentage of the Number of Estimated Locations of UPCs Being within a Certain Buffer Zone of Reference Utility Poles (%) | Number of Estimated UPCs | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| <1 m | <2 m | <3 m | <4 m | <5 m | <6 m | <7 m | <8 m | <9 m | <10 m | ||||
| 3 | 1 | 3 | 1.75 | 8.04 | 22.38 | 35.66 | 46.85 | 54.9 | 62.59 | 68.18 | 74.83 | 80.07 | 286 |
| 1 | 4 | 1.83 | 8.42 | 23.44 | 36.63 | 47.62 | 55.68 | 64.47 | 70.7 | 76.92 | 82.42 | 273 | |
| 1 | 5 | 1.92 | 7.69 | 23.08 | 37.31 | 49.23 | 57.69 | 67.31 | 72.69 | 79.23 | 85 | 260 | |
| 2 | 3 | 1.71 | 8.05 | 19.51 | 30.98 | 44.88 | 53.41 | 58.78 | 64.63 | 72.93 | 77.8 | 410 | |
| 2 | 4 | 1.75 | 8.27 | 19.8 | 31.08 | 45.36 | 53.88 | 60.15 | 66.92 | 74.94 | 79.95 | 399 | |
| 2 | 5 | 1.85 | 8.71 | 20.32 | 32.72 | 47.76 | 56.73 | 63.59 | 69.66 | 77.31 | 82.32 | 379 | |
| 3 | 3 | 2.37 | 8.84 | 20.47 | 31.9 | 43.32 | 50.86 | 57.54 | 64.01 | 71.12 | 75.86 | 464 | |
| 3 | 4 | 2.68 | 8.95 | 20.36 | 31.77 | 43.18 | 51.23 | 58.17 | 65.55 | 72.93 | 77.18 | 447 | |
| 3 | 5 | 2.56 | 9.3 | 20 | 32.79 | 44.88 | 53.02 | 60.23 | 66.98 | 74.65 | 79.53 | 430 | |
| 4 | 1 | 3 | 2 | 7.56 | 19.56 | 30.89 | 40.67 | 51.33 | 58 | 63.11 | 71.11 | 76 | 450 |
| 1 | 4 | 1.87 | 7.26 | 20.37 | 30.91 | 42.62 | 53.86 | 60.89 | 67.45 | 74.71 | 79.16 | 427 | |
| 1 | 5 | 2.02 | 7.83 | 20.96 | 32.32 | 44.44 | 55.81 | 63.38 | 70.45 | 77.78 | 83.33 | 396 | |
| 2 | 3 | 1.31 | 7.86 | 17.84 | 29.13 | 39.44 | 48.12 | 54.99 | 62.52 | 67.76 | 72.83 | 611 | |
| 2 | 4 | 1.2 | 7.72 | 18.01 | 29.5 | 41.68 | 51.29 | 58.32 | 65.87 | 71.7 | 76.33 | 583 | |
| 2 | 5 | 1.09 | 8.56 | 18.58 | 30.78 | 43.53 | 53.37 | 60.47 | 68.12 | 74.32 | 79.05 | 549 | |
| 3 | 3 | 1.35 | 7.77 | 16.89 | 29 | 38.42 | 46.79 | 55.31 | 62.78 | 68.76 | 74.14 | 669 | |
| 3 | 4 | 1.39 | 8.19 | 18.08 | 30.45 | 40.96 | 49.15 | 57.5 | 65.84 | 71.56 | 76.82 | 647 | |
| 3 | 5 | 1.47 | 9.61 | 19.06 | 30.94 | 42.51 | 50.98 | 59.45 | 68.4 | 74.43 | 78.99 | 614 | |
| 5 | 1 | 3 | 2.2 | 10.8 | 22.34 | 35.35 | 45.6 | 51.83 | 57.51 | 64.29 | 71.98 | 77.47 | 546 |
| 1 | 4 | 2.46 | 11 | 22.35 | 36.36 | 48.48 | 55.3 | 61.93 | 68.94 | 75.19 | 79.17 | 528 | |
| 1 | 5 | 2.63 | 11.3 | 22.63 | 37.37 | 49.7 | 56.97 | 63.84 | 71.92 | 77.78 | 83.23 | 495 | |
| 2 | 3 | 2.31 | 11 | 19.62 | 30.3 | 42.14 | 48.77 | 57.58 | 64.36 | 71.28 | 75.47 | 693 | |
| 2 | 4 | 2.53 | 10.3 | 19.2 | 32.44 | 45.83 | 53.27 | 61.61 | 68.3 | 73.66 | 77.98 | 672 | |
| 2 | 5 | 2.52 | 10.2 | 19.69 | 32.6 | 47.72 | 55.28 | 63.15 | 70.08 | 77.17 | 81.57 | 635 | |
| 3 | 3 | 2.37 | 10.4 | 19.05 | 29.17 | 39.55 | 47.83 | 56.37 | 63.34 | 69.51 | 74.24 | 761 | |
| 3 | 4 | 2.84 | 10.4 | 19.08 | 30.72 | 42.63 | 51.42 | 60.35 | 66.98 | 72.26 | 76.73 | 739 | |
| 3 | 5 | 3.01 | 11.1 | 20.23 | 32.28 | 43.9 | 53.52 | 62.41 | 70.01 | 76.33 | 80.63 | 697 | |
| 6 | 1 | 3 | 2.5 | 12.2 | 23.21 | 36.06 | 46.41 | 52.92 | 60.27 | 67.78 | 73.12 | 78.46 | 599 |
| 1 | 4 | 2.87 | 12.2 | 23.99 | 37.67 | 48.14 | 54.56 | 63.18 | 70.78 | 74.32 | 78.55 | 592 | |
| 1 | 5 | 2.5 | 12.9 | 25.04 | 38.64 | 49.91 | 57.07 | 65.47 | 73.7 | 78 | 82.47 | 559 | |
| 2 | 3 | 2.43 | 10.8 | 21.62 | 33.92 | 44.73 | 52.3 | 59.86 | 65.14 | 71.76 | 78.24 | 740 | |
| 2 | 4 | 2.46 | 10.3 | 21.61 | 34.75 | 47.74 | 56.5 | 64.71 | 70.86 | 74.69 | 79.07 | 731 | |
| 2 | 5 | 2.47 | 11.2 | 23.11 | 36.63 | 50.44 | 59.88 | 67.3 | 73.4 | 78.05 | 82.27 | 688 | |
| 3 | 3 | 2.22 | 9.75 | 20.49 | 32.47 | 41.23 | 50.49 | 57.9 | 63.21 | 70.62 | 75.43 | 810 | |
| 3 | 4 | 2.63 | 10.1 | 21.13 | 33.88 | 44.5 | 55.38 | 62.88 | 68.63 | 73.25 | 76.63 | 800 | |
| 3 | 5 | 2.76 | 10.8 | 22.97 | 34.78 | 46.19 | 57.09 | 64.44 | 70.47 | 76.12 | 79.4 | 762 | |
| 7 | 1 | 3 | 2.7 | 12.4 | 24.01 | 38.31 | 49.92 | 56.6 | 63.28 | 68.68 | 74.72 | 79.81 | 629 |
| 1 | 4 | 2.91 | 12.4 | 25.36 | 41.03 | 52.67 | 58.16 | 65.59 | 72.54 | 77.71 | 82.23 | 619 | |
| 1 | 5 | 2.74 | 13.2 | 27.05 | 43.15 | 55.65 | 60.96 | 69.01 | 75.34 | 80.65 | 84.93 | 584 | |
| 2 | 3 | 2.2 | 9.95 | 21.71 | 34.24 | 44.44 | 52.07 | 59.56 | 65.37 | 70.8 | 76.36 | 774 | |
| 2 | 4 | 2.61 | 9.52 | 23.21 | 36.64 | 47.72 | 56.19 | 64.15 | 70.01 | 73.14 | 77.84 | 767 | |
| 2 | 5 | 2.37 | 10.6 | 23.29 | 38.35 | 51.05 | 59.14 | 67.78 | 73.08 | 77.82 | 82.01 | 717 | |
| 3 | 3 | 2.75 | 10.2 | 22.04 | 33.53 | 43.95 | 52.22 | 59.28 | 66.35 | 72.1 | 75.57 | 835 | |
| 3 | 4 | 3.15 | 10.2 | 23.12 | 35.23 | 46.25 | 55.33 | 62.47 | 68.77 | 72.88 | 76.15 | 826 | |
| 3 | 5 | 3.31 | 11.5 | 23.92 | 36.01 | 48.6 | 56.87 | 65.14 | 70.99 | 75.95 | 79.64 | 786 | |
| 8 | 1 | 3 | 3.08 | 12.2 | 25.08 | 40.92 | 52.92 | 58.77 | 64.77 | 70.46 | 70.46 | 76.77 | 650 |
| 1 | 4 | 3.87 | 12.9 | 26.63 | 43.03 | 55.42 | 60.84 | 66.41 | 73.68 | 78.17 | 82.51 | 646 | |
| 1 | 5 | 4.08 | 13.7 | 28.22 | 45.02 | 58.4 | 63.62 | 70.47 | 77.16 | 82.54 | 86.79 | 613 | |
| 2 | 3 | 3.44 | 11.3 | 23.66 | 36.01 | 47.2 | 54.33 | 61.58 | 65.52 | 70.74 | 75.7 | 786 | |
| 2 | 4 | 3.68 | 11.3 | 25.51 | 37.44 | 50 | 57.61 | 64.47 | 69.16 | 72.21 | 76.78 | 788 | |
| 2 | 5 | 3.49 | 12.1 | 26.71 | 39.19 | 52.62 | 59.46 | 67.65 | 72.89 | 77.18 | 80.54 | 745 | |
| 3 | 3 | 3.05 | 11.2 | 23.12 | 34.62 | 45.42 | 52.93 | 60.09 | 66.2 | 71.24 | 75.7 | 852 | |
| 3 | 4 | 3.51 | 11.2 | 24.09 | 35.79 | 47.6 | 56.02 | 61.99 | 69.36 | 72.4 | 76.02 | 855 | |
| 3 | 5 | 3.78 | 13.3 | 25.61 | 38.66 | 49.88 | 57.44 | 65.73 | 71.71 | 76.1 | 79.63 | 820 | |
| 9 | 1 | 3 | 2.67 | 11.7 | 24.67 | 41.46 | 52.15 | 58.99 | 65.53 | 71.92 | 76.37 | 82.91 | 673 |
| 1 | 4 | 2.85 | 12 | 26.39 | 42.73 | 54.72 | 61.62 | 66.87 | 73.01 | 77.21 | 82.01 | 667 | |
| 1 | 5 | 3.14 | 13.8 | 28.57 | 45.84 | 58.87 | 64.52 | 70.8 | 76.77 | 81.16 | 85.71 | 637 | |
| 2 | 3 | 3.18 | 11.3 | 22.03 | 36.72 | 47.37 | 54.59 | 61.57 | 65.97 | 70.26 | 75.64 | 817 | |
| 2 | 4 | 3.04 | 12.2 | 23.45 | 37.3 | 48.97 | 57.23 | 62.33 | 67.8 | 71.08 | 75.7 | 823 | |
| 2 | 5 | 3.47 | 12.5 | 25.06 | 40.36 | 51.8 | 59.13 | 66.07 | 71.47 | 75.45 | 78.92 | 778 | |
| 3 | 3 | 2.95 | 11.4 | 22.05 | 36.36 | 47.16 | 54.77 | 60.91 | 65.8 | 70.11 | 75.34 | 880 | |
| 3 | 4 | 2.83 | 12.2 | 23.42 | 36.88 | 49.21 | 56.56 | 62.44 | 67.99 | 71.15 | 75.23 | 884 | |
| 3 | 5 | 3.4 | 12.9 | 24.74 | 39.98 | 51.11 | 58.15 | 64.95 | 71.04 | 75.38 | 78.55 | 853 | |
| Sobol (N = 500) | ||||
|---|---|---|---|---|
| Parameter | S1 | S1_conf | ST | ST_conf |
| Number of views | 0.6786 | 0.0979 | 0.6851 | 0.0730 |
| Threshold of angle | 0.2921 | 0.060 | 0.2962 | 0.0299 |
| Threshold of distance | 0.0150 | 0.0160 | 0.0157 | 0.0021 |
| Sobol (N = 500) | ||||
|---|---|---|---|---|
| Parameter | S1 | S1_conf | ST | ST_conf |
| Number of views | 0.5084 | 0.08334 | 0.6066 | 0.0779 |
| Threshold of angle | 0.2185 | 0.05645 | 0.2841 | 0.03889 |
| Threshold of distance | 0.15367 | 0.0500 | 0.1826 | 0.0274 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Witharana, C.; Li, W.; Zhang, C.; Li, X.; Parent, J. Using Deep Learning to Identify Utility Poles with Crossarms and Estimate Their Locations from Google Street View Images. Sensors 2018, 18, 2484. https://0-doi-org.brum.beds.ac.uk/10.3390/s18082484
Zhang W, Witharana C, Li W, Zhang C, Li X, Parent J. Using Deep Learning to Identify Utility Poles with Crossarms and Estimate Their Locations from Google Street View Images. Sensors. 2018; 18(8):2484. https://0-doi-org.brum.beds.ac.uk/10.3390/s18082484
Chicago/Turabian StyleZhang, Weixing, Chandi Witharana, Weidong Li, Chuanrong Zhang, Xiaojiang Li, and Jason Parent. 2018. "Using Deep Learning to Identify Utility Poles with Crossarms and Estimate Their Locations from Google Street View Images" Sensors 18, no. 8: 2484. https://0-doi-org.brum.beds.ac.uk/10.3390/s18082484