Multi-Sensor Spectral Imaging of Geological Samples: A Data Fusion Approach Using Spatio-Spectral Feature Extraction

 , , , ,
, , , ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
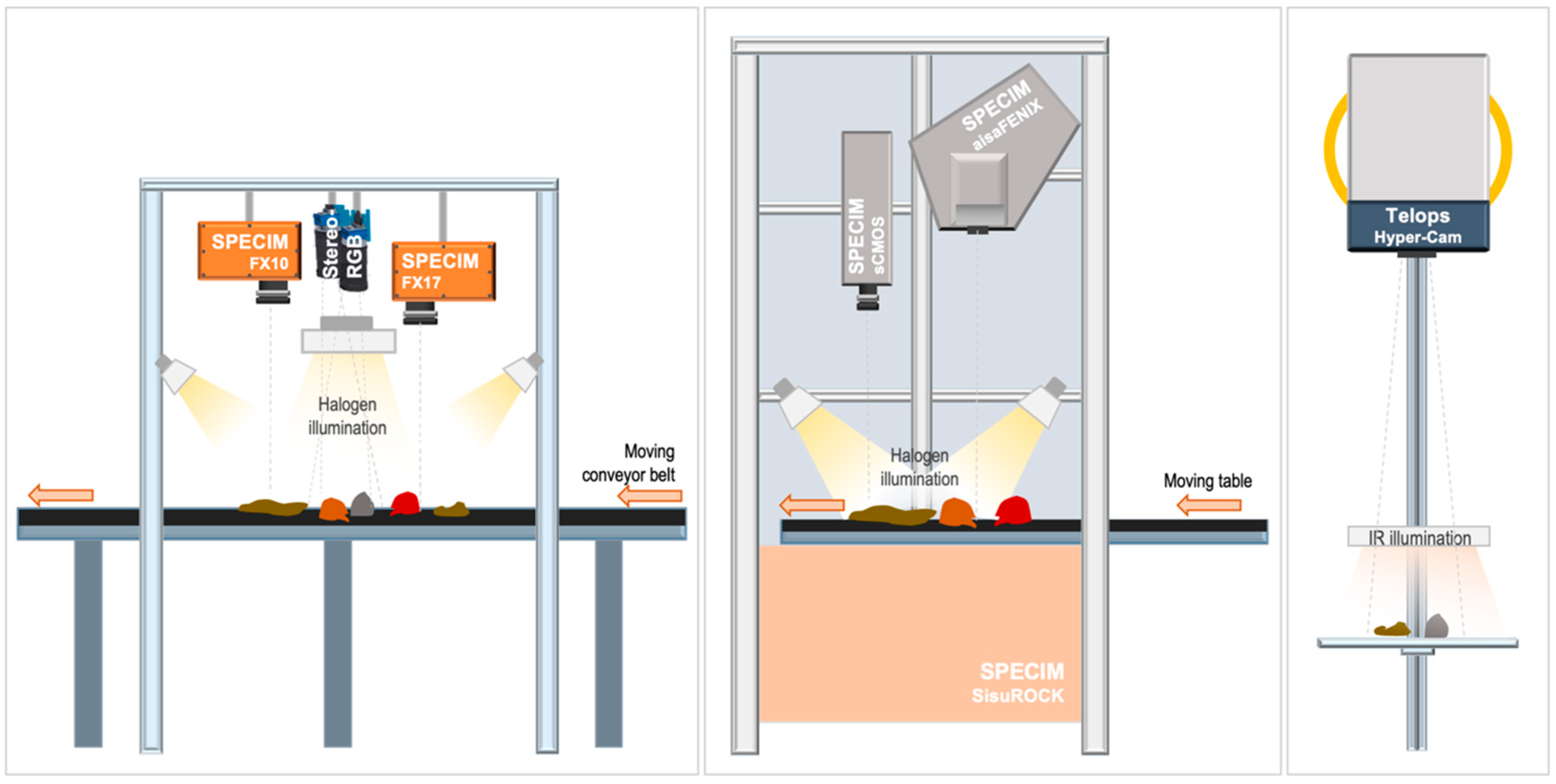
2.1. Experimental Setup and Sensor Parameters
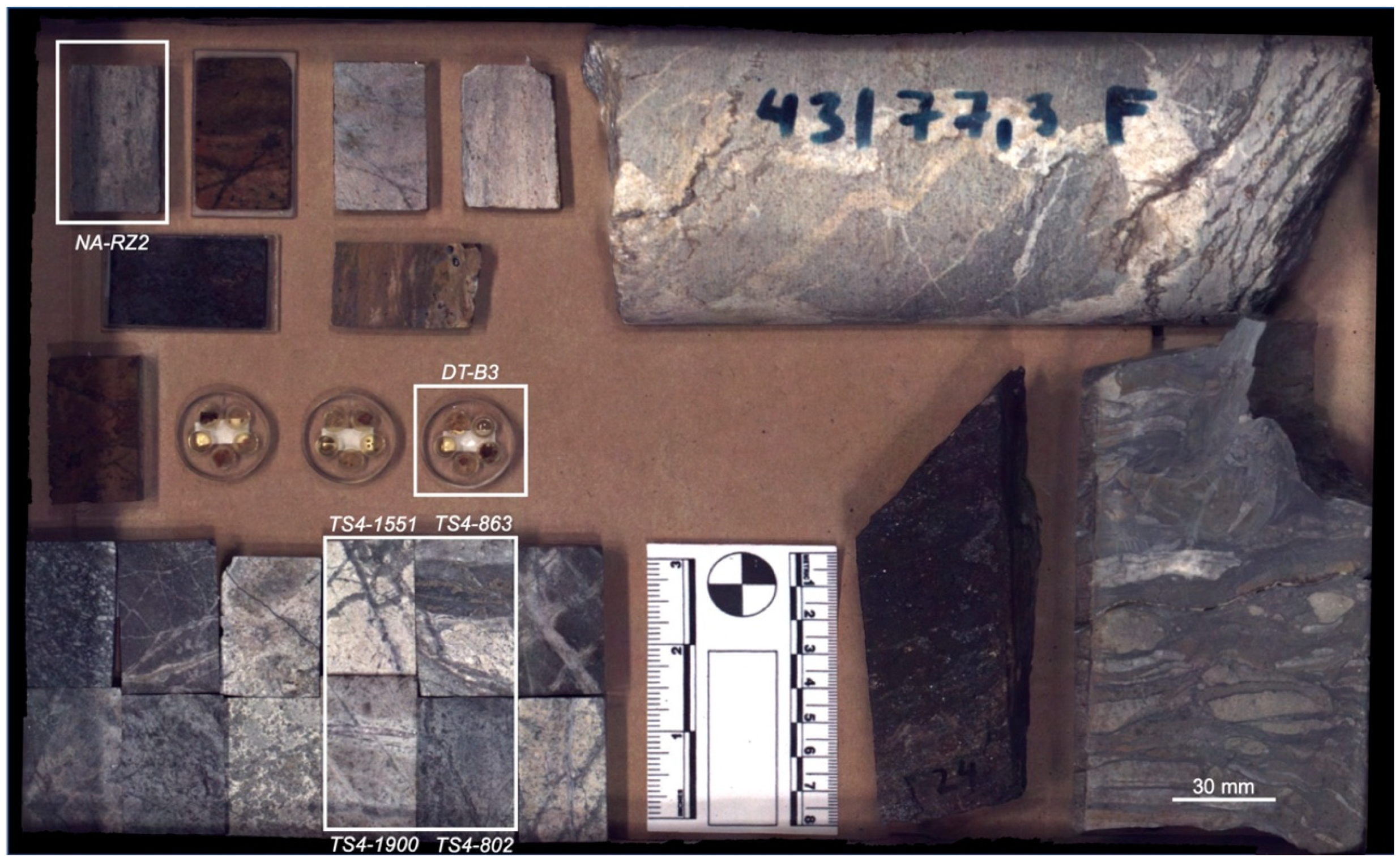
2.2. Samples Analyzed
2.3. Data Pre-processing
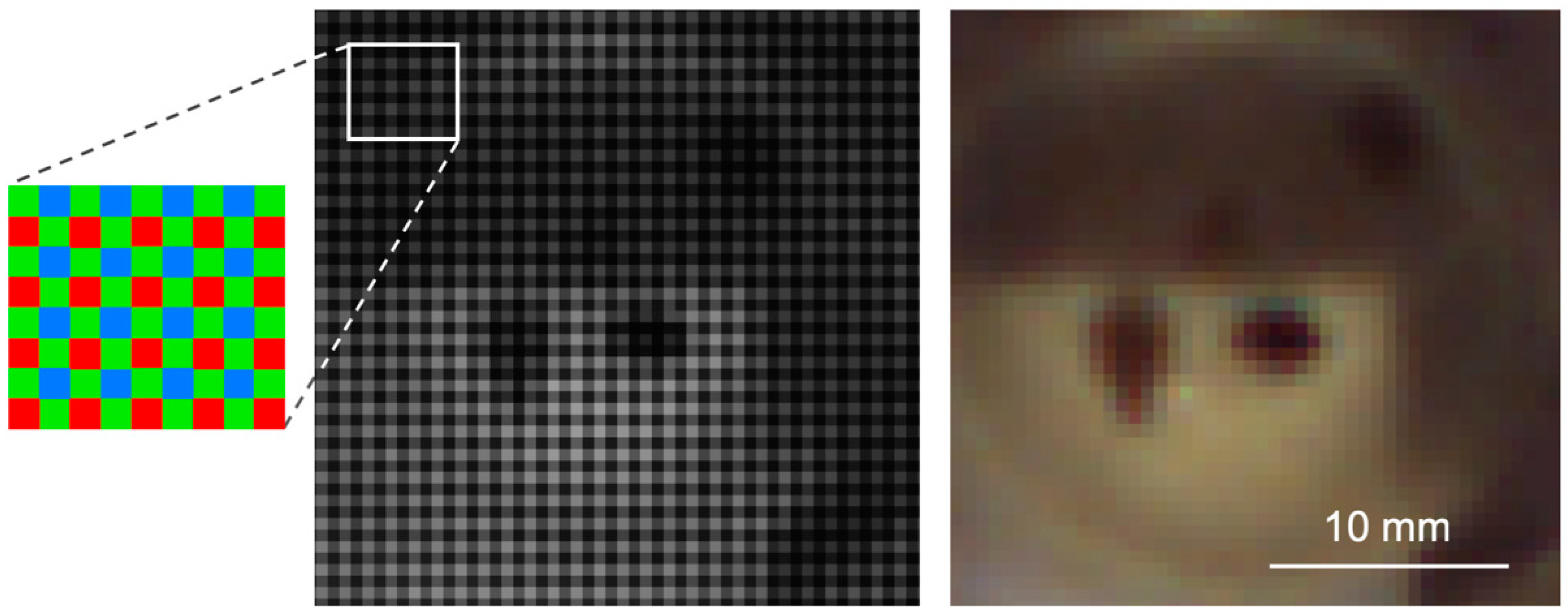
2.3.1. Teledyne Dalsa RGB
2.3.2. Specim HSI Sensors
2.3.3. Telops Hyper-Cam
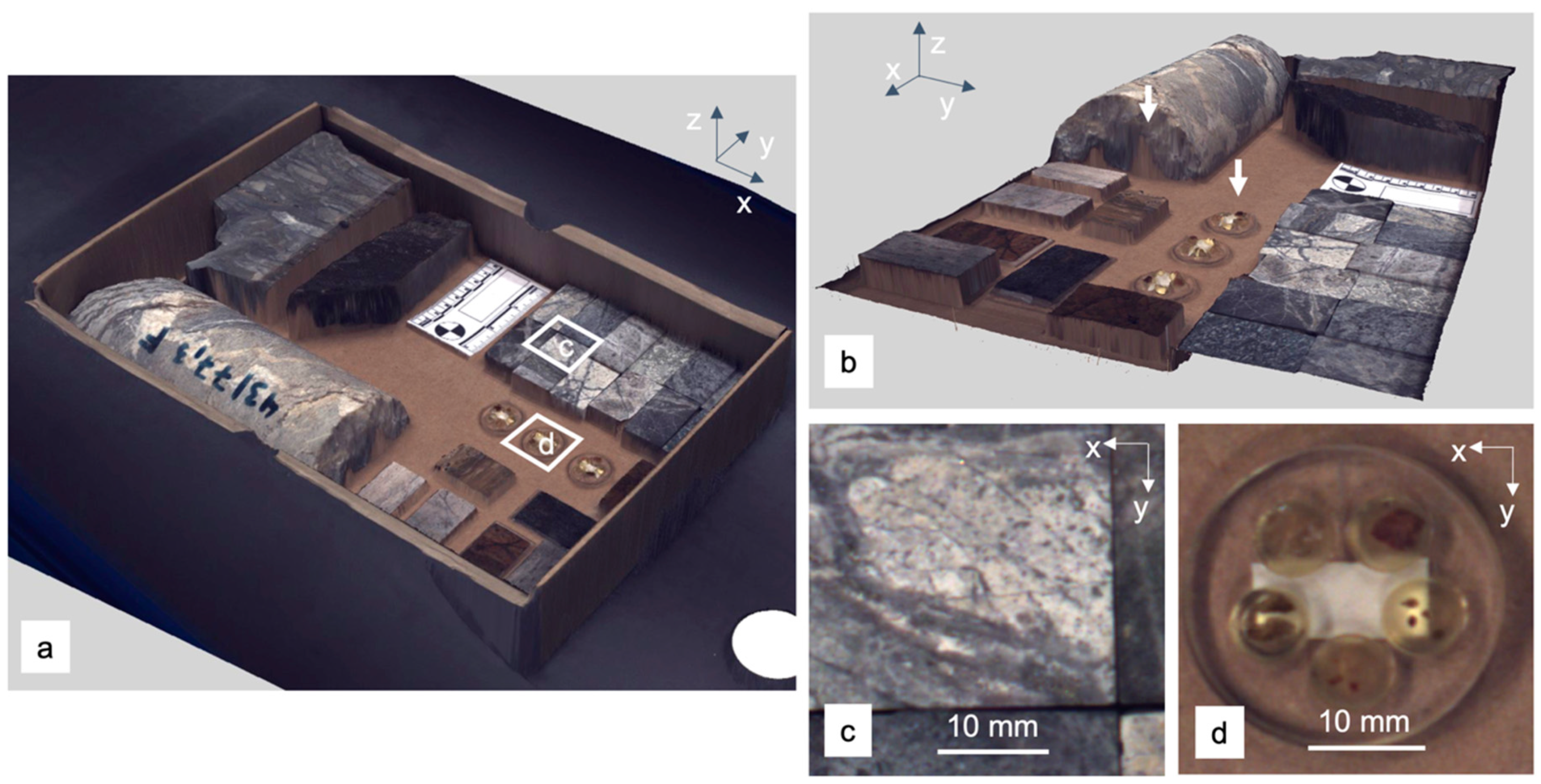
2.3.4. Co-registration
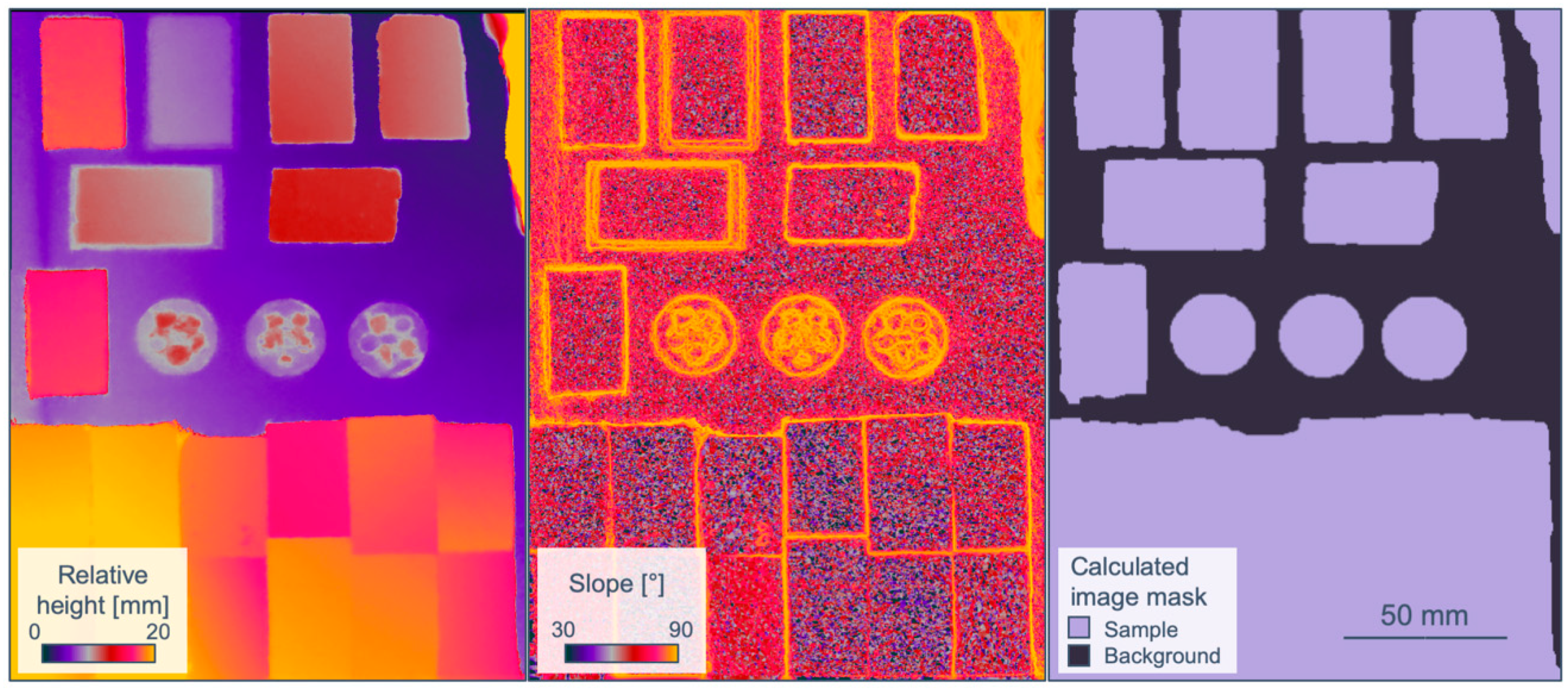
2.3.5. Sample-background Separation and Masking
2.3.6. Illumination Effects
2.3.7. Validation
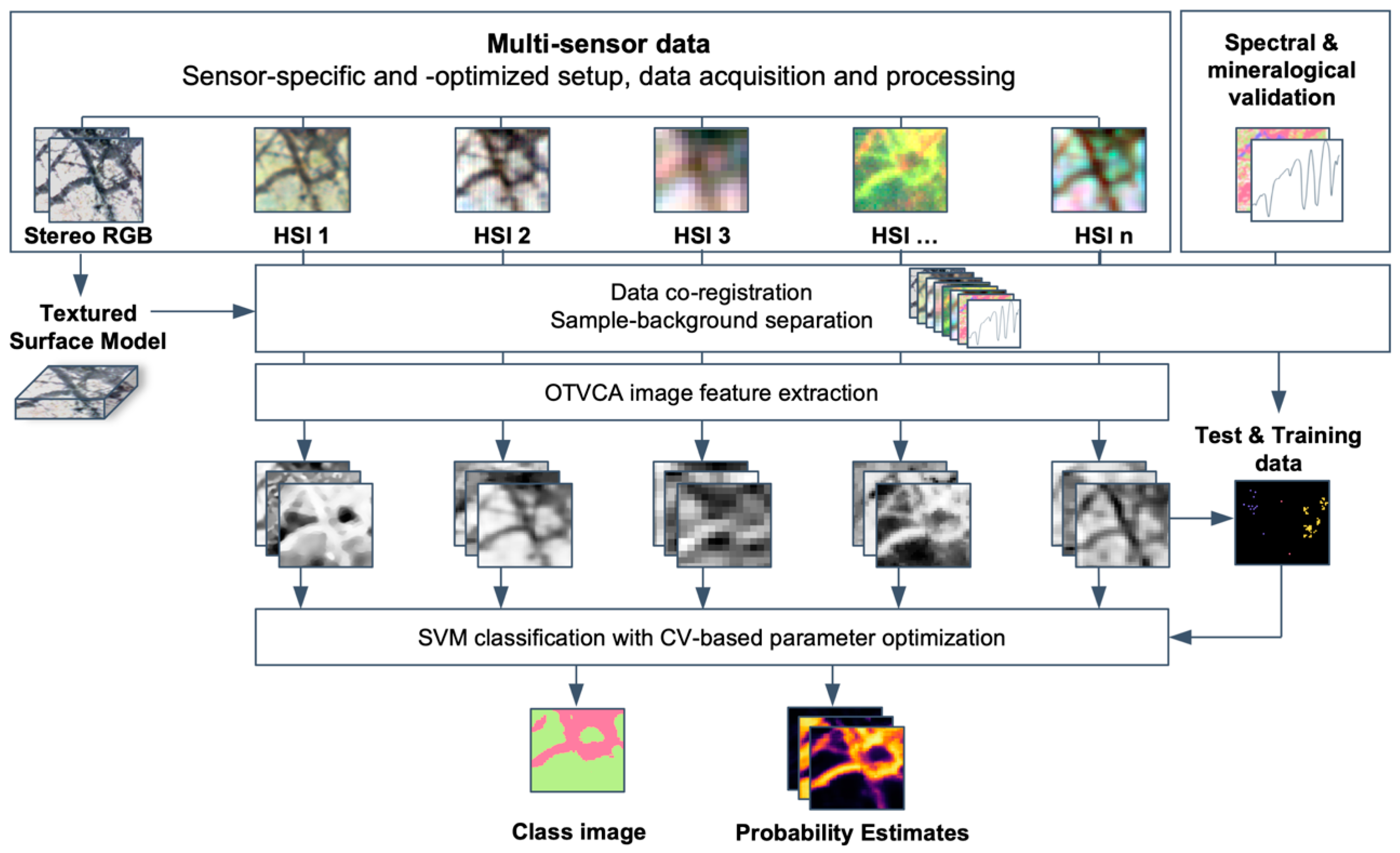
2.4. Feature Extraction and Classification
3. Results
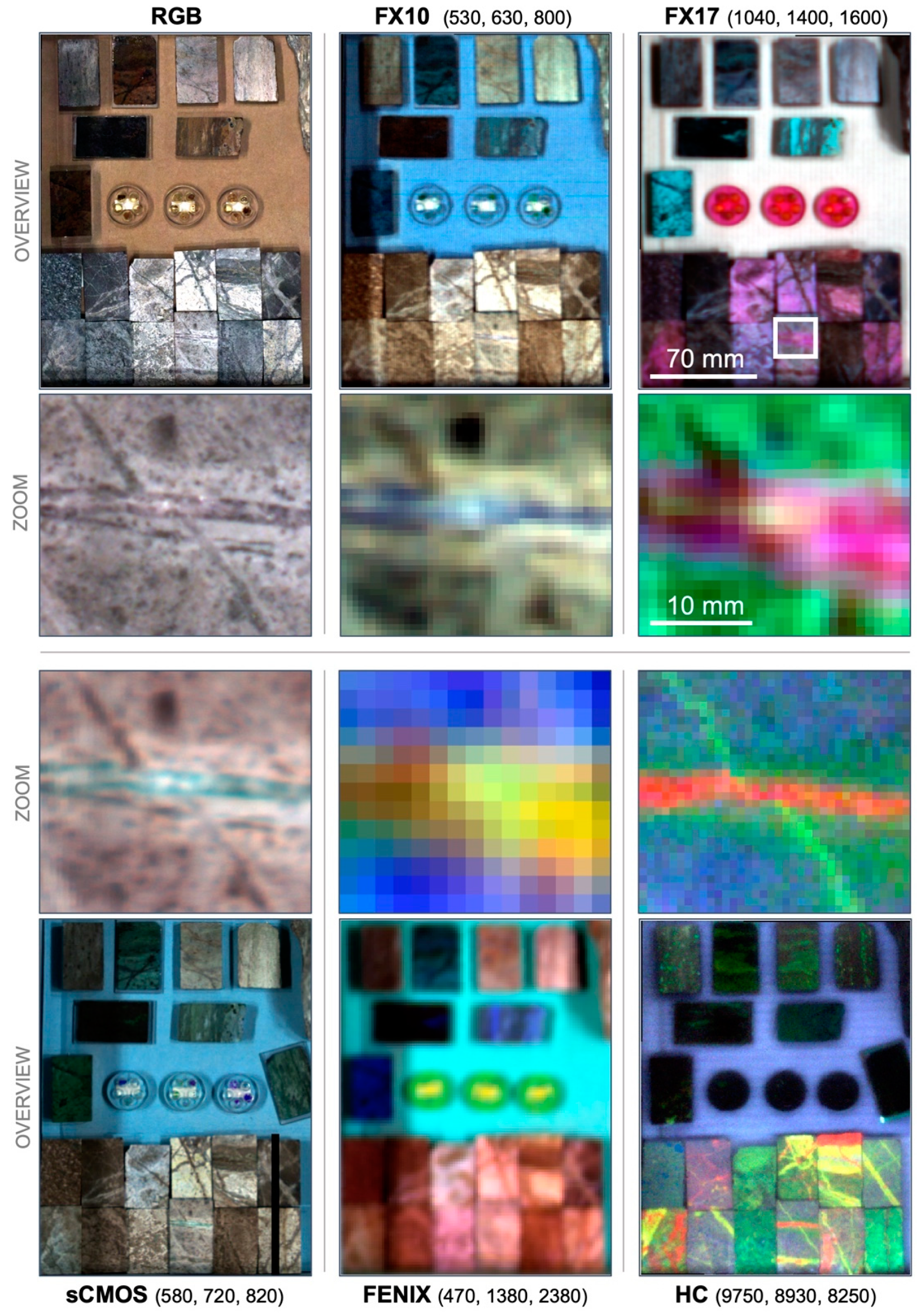
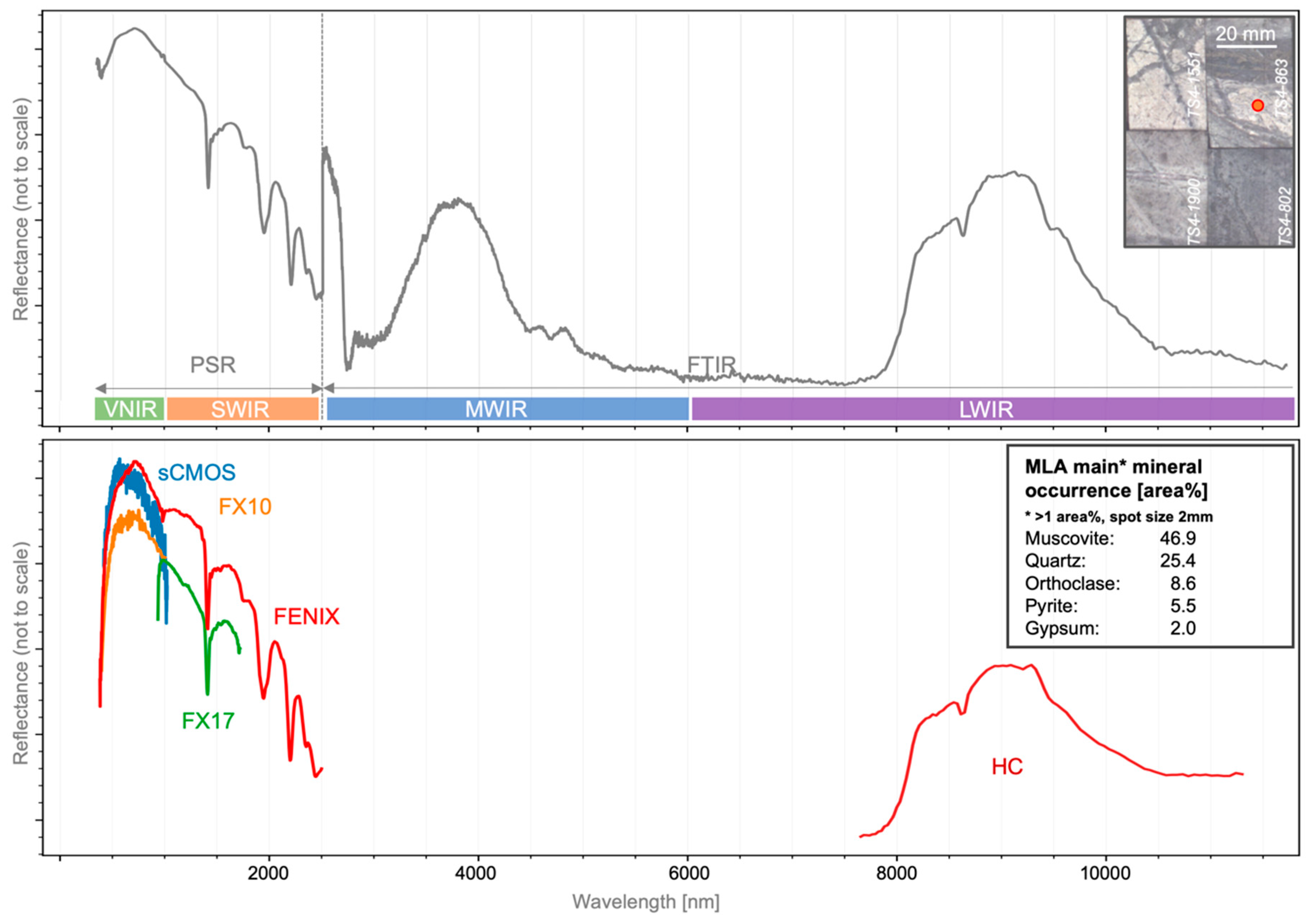
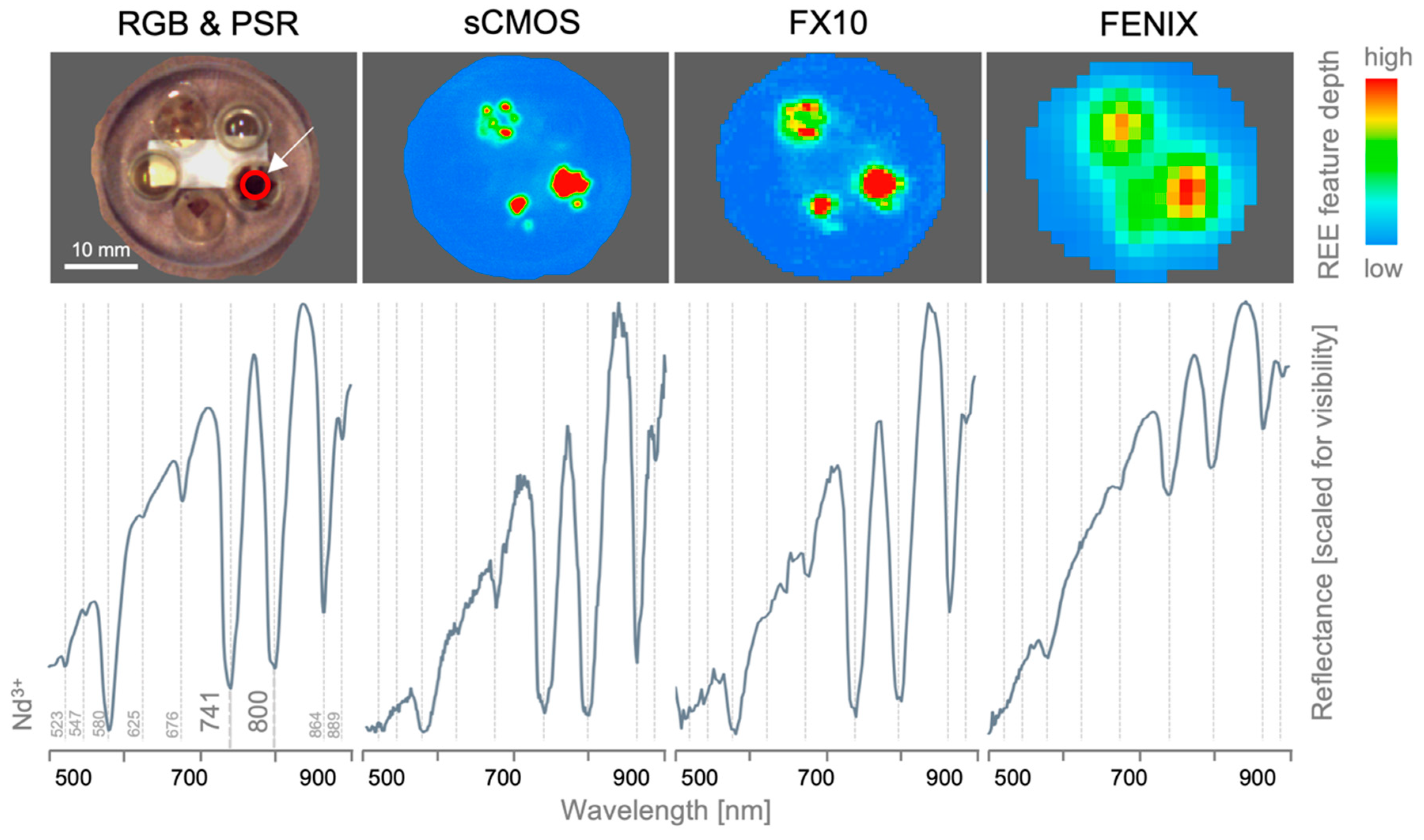
3.1. Spatial and Spectral Integration of the Multi-Sensor Dataset
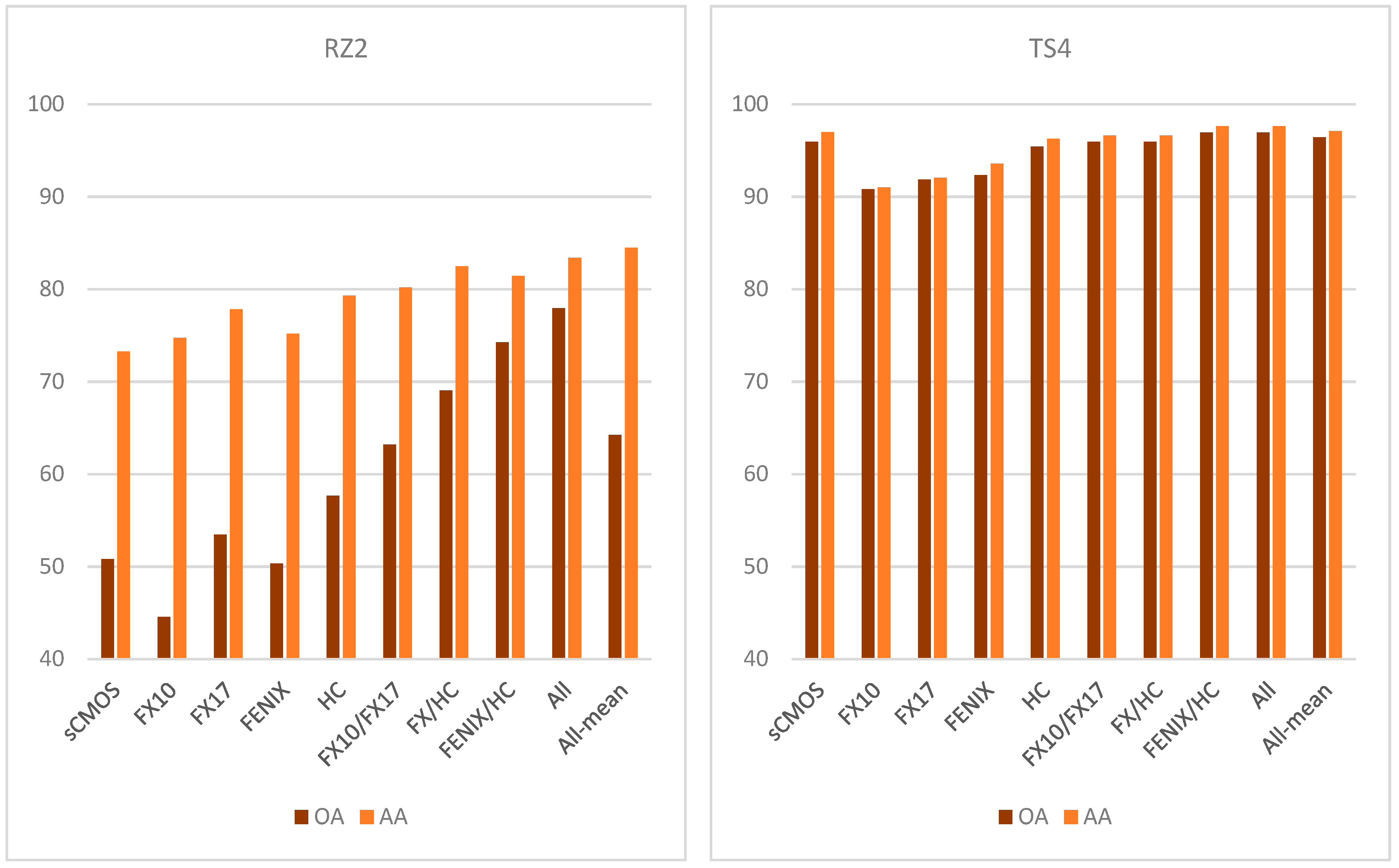
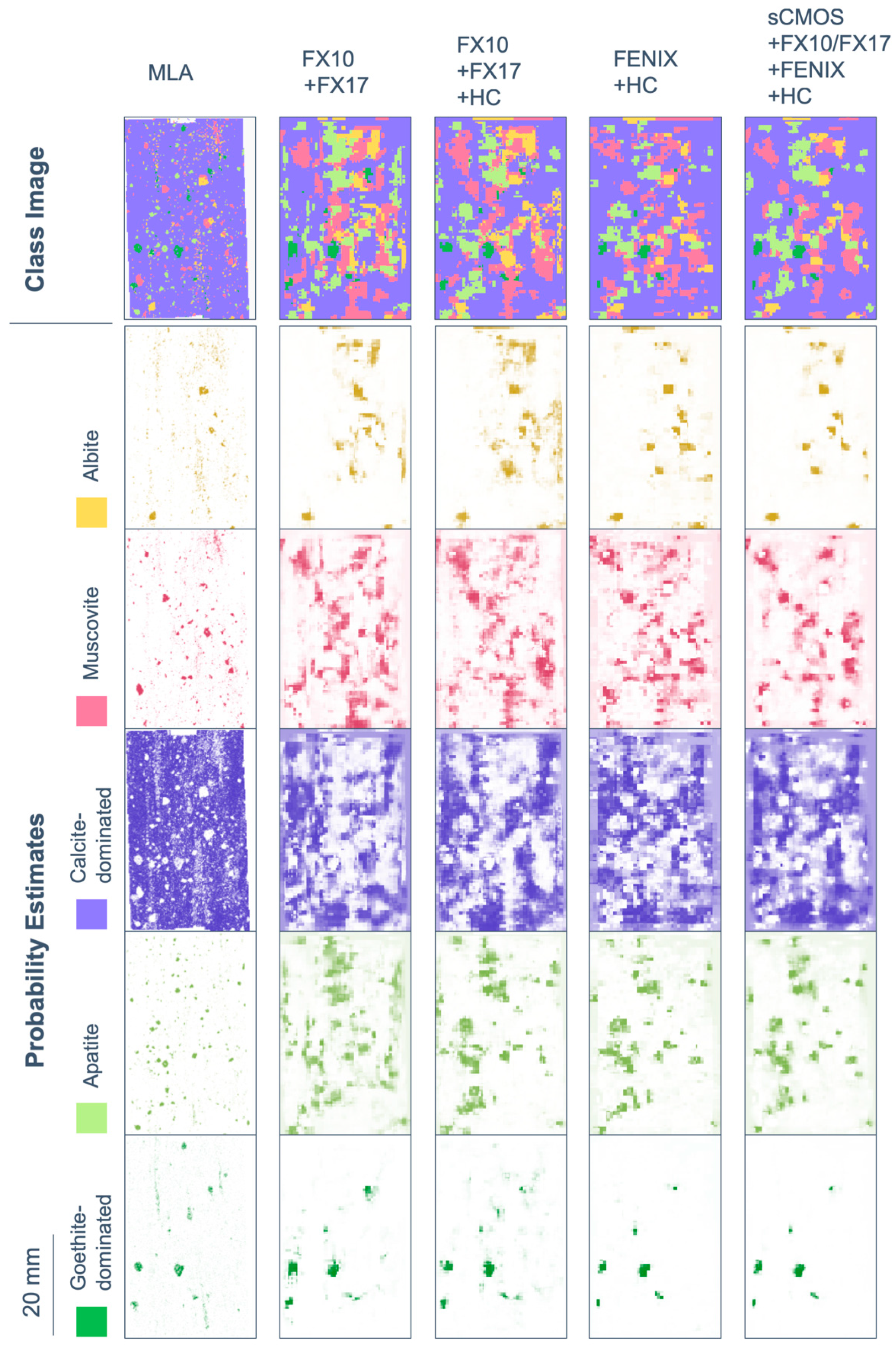
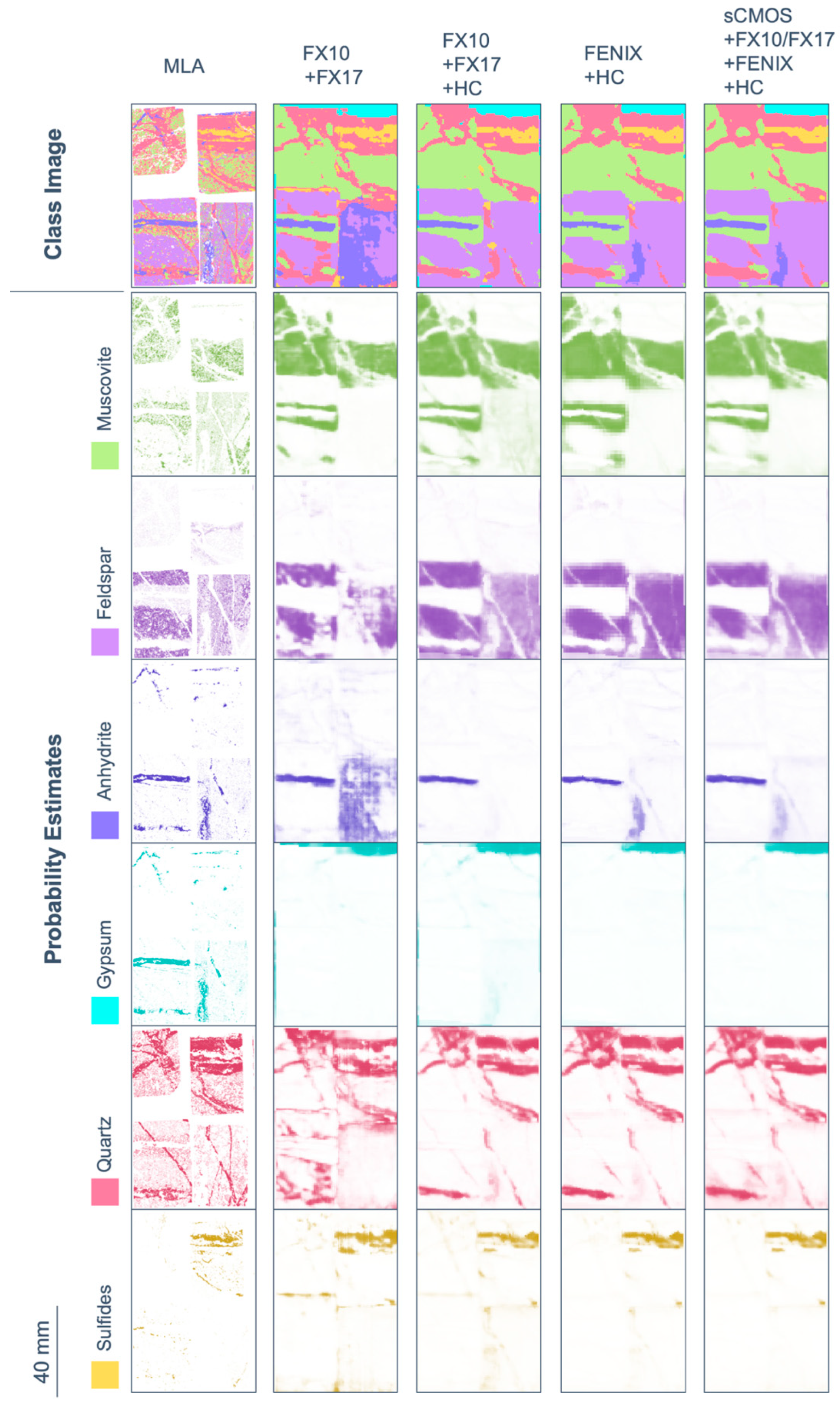
3.2. Multi-sensor Data Fusion for Image Classification
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wotruba, H.; Harbeck, H. Sensor-Based Sorting. In Ullmann’s Encyclopedia of Industrial Chemistry; Wiley-VCH Verlag GmbH & Co. KGaA: Weinheim, Germany, 2010; ISBN 978-3-527-30673-2. [Google Scholar]
- Mason, P.; Huntington, J. HyLogger 3 Components and Pre-Processing: An Overview; Technical Note 2012-002; Northern Territory Geological Survey: Darwin, Australia, October 2012.
- Schodlok, M.C.; Whitbourn, L.; Huntington, J.; Mason, P.; Green, A.; Berman, M.; Coward, D.; Connor, P.; Wright, W.; Jolivet, M.; et al. HyLogger-3, a visible to shortwave and thermal infrared reflectance spectrometer system for drill core logging: Functional description. Aust. J. Earth Sci. 2016, 63, 929–940. [Google Scholar]
- Tappert, M.; Rivard, B.; Giles, D.; Tappert, R.; Mauger, A. Automated Drill Core Logging Using Visible And Near-Infrared Reflectance Spectroscopy: A Case Study From The Olympic Dam Iocg Deposit, South Australia. Econ. Geol. 2011, 106, 289–296. [Google Scholar] [CrossRef]
- Arne, D.; House, E.; Pontual, S.; Huntington, J. Hyperspectral interpretation of selected drill cores from orogenic gold deposits in central Victoria, Australia. Aust. J. Earth Sci. 2016, 63, 1003–1025. [Google Scholar] [CrossRef]
- Ayling, B.; Huntington, J.; Smith, B.; Edwards, D. Hyperspectral logging of middle Cambrian marine sediments with hydrocarbon prospectivity: A case study from the southern Georgina Basin, northern Australia. Aust. J. Earth Sci. 2016, 63, 1069–1085. [Google Scholar] [CrossRef]
- Gordon, G.; McAvaney, S.; Wade, C. Spectral characteristics of the Gawler Range Volcanics in drill core Myall Creek RC1. Aust. J. Earth Sci. 2016, 63, 973–986. [Google Scholar]
- Burley, L.L.; Barnes, S.J.; Laukamp, C.; Mole, D.R.; Le Vaillant, M.; Fiorentini, M.L. Rapid mineralogical and geochemical characterisation of the Fisher East nickel sulphide prospects, Western Australia, using hyperspectral and pXRF data. Ore Geol. Rev. 2017, 90, 371–387. [Google Scholar] [CrossRef]
- Ross, P.-S.; Bourke, A.; Fresia, B. A multi-sensor logger for rock cores: Methodology and preliminary results from the Matagami mining camp, Canada. Ore Geol. Rev. 2013, 53, 93–111. [Google Scholar] [CrossRef]
- Wang, D.; Lagerstrom, R.; Sun, C.; Laukamp, C.; Quigley, M.; Whitbourn, L.; Mason, P.; Connor, P.; Fisher, L. Automated vein detection for drill core analysis by fusion of hyperspectral and visible image data. In Proceedings of the 2016 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Nanjing, China, 28–30 November 2016; pp. 1–6. [Google Scholar]
- Bolin, B.J.; Moon, T.S. Sulfide detection in drill core from the Stillwater Complex using visible/near-infrared imaging spectroscopy. Geophysics 2003, 68, 1561–1568. [Google Scholar] [CrossRef]
- Kruse, F.A.; Weatherbee, O.; Peppin, W.; Bedell, R.; Calvin, W.; Taranik, J.V. HSI Mineral Mapping from Airborne, Outcrop, and Drill-Core Perspectives. In Proceedings of the SPIE Symposium on Defense and Security, Orlando, FL, USA, 4 May 2010. [Google Scholar]
- Baissa, R.; Labbassi, K.; Launeau, P.; Gaudin, A.; Ouajhain, B. Using HySpex SWIR-320m hyperspectral data for the identification and mapping of minerals in hand specimens of carbonate rocks from the Ankloute Formation (Agadir Basin, Western Morocco). J. Afr. Earth Sci. 2011, 61, 1–9. [Google Scholar] [CrossRef]
- Turner, D.J.; Rivard, B.; Groat, L.A. Visible and short-wave infrared reflectance spectroscopy of REE fluorocarbonates. Am. Mineral. 2014, 99, 1335–1346. [Google Scholar] [CrossRef]
- Mathieu, M.; Roy, R.; Launeau, P.; Cathelineau, M.; Quirt, D. Alteration mapping on drill cores using a HySpex SWIR-320m hyperspectral camera: Application to the exploration of an unconformity-related uranium deposit (Saskatchewan, Canada). J. Geochem. Explor. 2017, 172, 71–88. [Google Scholar] [CrossRef]
- Dalm, M.; Buxton, M.W.N.; van Ruitenbeek, F.J.A. Ore–Waste Discrimination in Epithermal Deposits Using Near-Infrared to Short-Wavelength Infrared (NIR-SWIR) Hyperspectral Imagery. Math. Geosci. 2018, 1–27. [Google Scholar] [CrossRef]
- Tusa, L.; Andreani, L.; Khodadadzadeh, M.; Contreras, C.; Ivascanu, P.; Gloaguen, R.; Gutzmer, J. Mineral Mapping and Vein Detection in Hyperspectral Drill-Core Scans: Application to Porphyry-Type Mineralization. Minerals 2019, 9, 122. [Google Scholar] [CrossRef]
- Contreras, I.C.; Khodadadzadeh, M.; Tusa, L.; Gloaguen, R. A machine learning technique for drill core hyperspectral data analysis. In Proceedings of the 9th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Amsterdam, The Netherlands, 23–26 September 2018. [Google Scholar]
- Hunt, G.R. Spectral Signatures of Particulate Minerals in The Visible and Near Infrared. Geophysics 1977, 42, 501–513. [Google Scholar] [CrossRef]
- Kuosmanen, V.; Arkimaa, H.; Tiainen, M.; Bärs, R. Hyperspectral close-range LWIR imaging spectrometry–3 case studies. In Geophysical Signatures of Mineral Deposit Types in Finland; Airo, M.-L., Ed.; Geological Survey of Finland: Espoo, Finland, 2015; Volume 58, pp. 117–144. [Google Scholar]
- Reginiussen, H. Borrkärneskanning vid SGU. Available online: https://www.sgu.se/globalassets/om-sgu/anvandarrad/prospekteringsrad/prospekteringsrad-oktober-bilaga-10.pdf (accessed on 25 October 2018).
- Tappert, M.C.; Rivard, B.; Fulop, A.; Rogge, D.; Feng, J.; Tappert, R.; Stalder, R. Characterizing Kimberlite Dilution by Crustal Rocks at the Snap Lake Diamond Mine (Northwest Territories, Canada) using SWIR (1.90–2.36 μm) and LWIR (8.1–11.1 μm) Hyperspectral Imagery Collected from Drill Core. Econ. Geol. 2015, 110, 1375–1387. [Google Scholar] [CrossRef]
- Clark, R.N. Spectroscopy of Rocks and Minerals, and Principles of Spectroscopy. In Remote Sensing for the Earth Sciences; Manual of Remote Sensing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 1999; Chapter 1; pp. 3–58. [Google Scholar]
- Kruse, F.A. Integrated visible and near-infrared, shortwave infrared, and longwave infrared full-range hyperspectral data analysis for geologic mapping. J. Appl. Remote Sens. 2015, 9, 096005. [Google Scholar] [CrossRef]
- McDowell, M.; Kruse, F. Enhanced Compositional Mapping through Integrated Full-Range Spectral Analysis. Remote Sens. 2016, 8, 757. [Google Scholar] [CrossRef]
- Kopačková, V.; Koucká, L. Integration of Absorption Feature Information from Visible to Longwave Infrared Spectral Ranges for Mineral Mapping. Remote Sens. 2017, 9, 1006. [Google Scholar] [CrossRef]
- Bassani, C.; Cavalli, R.M.; Cavalcante, F.; Cuomo, V.; Palombo, A.; Pascucci, S.; Pignatti, S. Deterioration status of asbestos-cement roofing sheets assessed by analyzing hyperspectral data. Remote Sens. Environ. 2007, 109, 361–378. [Google Scholar] [CrossRef]
- Feng, J.; Rogge, D.; Rivard, B. Comparison of lithological mapping results from airborne hyperspectral VNIR-SWIR, LWIR and combined data. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 340–353. [Google Scholar] [CrossRef]
- Hughes, G. On the mean accuracy of statistical pattern recognizers. IEEE Trans. Inf. Theory 1968, 14, 55–63. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry–merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 99, pp. 1150–1157. [Google Scholar]
- Muja, M.; Lowe, D. Fast approximate nearest neighbors with automatic algorithm configuration. In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, Lisboa, Portugal, 5–8 February 2009; Volume 1, pp. 1–10. [Google Scholar]
- Suzuki, S.; Abe, K. Topological structural analysis of digitized binary images by border following. Comput. Vis. Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]
- Bradski, G. The opencv library. Dr. Dobb’s J. Softw. Tools 2000, 25, 122–125. [Google Scholar]
- Rasti, B.; Ulfarsson, M.O.; Sveinsson, J.R. Hyperspectral Feature Extraction Using Total Variation Component Analysis. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6976–6985. [Google Scholar] [CrossRef]
- Rasti, B.; Ghamisi, P.; Gloaguen, R. Hyperspectral and LiDAR Fusion Using Extinction Profiles and Total Variation Component Analysis. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3997–4007. [Google Scholar] [CrossRef]
- Ghamisi, P.; Yokoya, N.; Li, J.; Liao, W.; Liu, S.; Plaza, J.; Rasti, B.; Plaza, A. Advances in Hyperspectral Image and Signal Processing: A Comprehensive Overview of the State of the Art. IEEE Geosci. Remote Sens. Mag. 2017, 5, 37–78. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 27. [Google Scholar] [CrossRef]
- Ghamisi, P.; Plaza, J.; Chen, Y.; Li, J.; Plaza, A.J. Advanced Spectral Classifiers for Hyperspectral Images: A review. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–32. [Google Scholar] [CrossRef] [Green Version]
- Turner, D. Reflectance Spectroscopy and Imaging Spectroscopy of Rare Earth Element-Bearing Mineral and Rock Samples. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2015. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Spectral Range | Spectral Res. (FWHM) | Approx. Peak-SNR | Image Size (px) | FOV | Spatial Res.* |
|---|---|---|---|---|---|---|
| Teledyne Dalsa C4020 (2x) | RGB (Bayer) | - | 4000 × 2000 px frame | 54.6°× 27.3° | 0.15 mm | |
| Specim sCMOS | VNIR: 0.40–1.00 µm | 2.9 nm | 170:1 | 2185 px line | 15° | 0.08 mm |
| Specim FX10 | VNIR: 0.40–1.00 µm | 5.5 nm | 600:1 | 1024 px line | 54° | 0.58 mm |
| Specim FX17 | SWIR: 0.90–1.70 µm | 8 nm | 1000:1 | 640 px line | 75° | 0.96 mm |
| Specim AisaFENIX | VNIR: 0.38–0.97 µm SWIR: 0.97–2.50 µm | 3.5 nm; 12 nm | 600–1000:1 1050:1 | 384 px line | 32.3° | 1.54 mm |
| Telops Hyper-Cam | LWIR: 1300–881 cm−1/7.70–11.80 µm | 6 cm−1/ 36–76 nm | 250:1 | 320 × 256 px frame | 6.4°× 5.1° | 0.62 mm |
| Spectral Evolution PSR-3500 | VNIR: 0.35–1.00 µm SWIR: 1.00–2.50 µm | 3.5 nm; 7–10 nm | 600:1 | Point measurement | - | ~5.00 mm |
| Agilent 4300 FTIR | SWIR-LWIR: 4500–650 cm−1/2.22–15.39 µm | 2 cm−1/ 1–47 nm | Point measurement | - | ~2.00 mm |
| Sensor | Sensor-Target- Distance | Exposure Time | Frame Rate | Conveyor Speed* | Binning (spat/spec) * | Data Size (150 × 240 mm) |
|---|---|---|---|---|---|---|
| Teledyne Dalsa C4020 (stereo) | 60 cm | 1 ms | 8 Hz (frame) | 13 cm/s | - | 75 MB |
| Specim sCMOS | 65 cm | 10 ms | 60 Hz | 0.8 cm/s | 2/1 | 5600 MB |
| Specim FX10 | 58 cm | 4 ms | 240 Hz | 13 cm/s | 1/2 | 133 MB |
| Specim FX17 | 40 cm | 4 ms | 140 Hz | 13 cm/s | 1/1 | 50 MB |
| Specim AisaFENIX | 102 cm | VNIR: 14 ms SWIR: 4 ms | 30 Hz | 5 cm/s | VNIR: 2/2; SWIR: 1/1 | 37 MB |
| Telops Hyper-Cam | 177 cm | 0.25 ms | 0.08 Hz (frame) | - | - | 31 MB |
| Sample Number | Origin | Sample Treatment | Main Mineralogy 1/ Main REE (If Applicable) 2 |
|---|---|---|---|
| NA-RZ2 | Carbonatite, Namibia | Rock, clean cut | Cal, Ms, Ab, Ap, Fl / La, Ce, Nd |
| TS4-802 | Copper-Gold- | Rock, clean cut | Ms, Ab, Qz, Gp, Or, Fe-Oxide, An70, Chm, Chl, Hbl, Ilt |
| TS4-863 | Porphyry, | Rock, clean cut | Qz, Ms, Py, Or, Gp |
| TS4-1551 | Romania | Rock, clean cut | Qz, Ms, Ank, Or, Gp, Hbl |
| TS4-1900 | Rock, clean cut | Qz, Ab, Ms, An70, Gp, Or, Chm, Hbl, Py, Ilt | |
| DT-B3 | Miscellaneous | Embedded mineral grains, polished | Parisite/La, Ce, Pr, Nd, Sm, Y Bastnaesite/La, Ce, Pr, Nd, Sm |
| Dataset | Number of Pixels | Number of Classes | Training Pixel per Class | Test Pixel per Class |
|---|---|---|---|---|
| RZ2 | 172.900 | 5 | 100 | Varying (~100–85.000) |
| TS4 | 657.150 | 6 | 25 | 25 |
| Sensor Setup | Low-Cost | Speed | Spatial Detail | Detectable Minerals | Characteristic Minerals | Potential Application Fields |
|---|---|---|---|---|---|---|
| RGB | ***** | ***** | ***** | * | Only shapes and textures | Photogrammetry, segmentation, texture analysis |
| FX | **** | **** | *** | *** | e.g., iron oxides, gypsum, micas, REEs | Fast mineral domain mapping (e.g., raw material streams) |
| sCMOS | *** | * | ***** | ** | e.g., iron oxides, REEs | High spatial and good spectral resolution (e.g., low speed but accurate mineral mapping) |
| FENIX | ** | ** | * | **** | e.g., clays, carbonates, REEs, micas | Mineral mapping/characterization but relatively slow (good for drillcore scanning) |
| HC | * | * | *** | **** | e.g., silicates, carbonates | Mineral mapping/characterization but relatively slow (good for drillcore scanning) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lorenz, S.; Seidel, P.; Ghamisi, P.; Zimmermann, R.; Tusa, L.; Khodadadzadeh, M.; Contreras, I.C.; Gloaguen, R. Multi-Sensor Spectral Imaging of Geological Samples: A Data Fusion Approach Using Spatio-Spectral Feature Extraction. Sensors 2019, 19, 2787. https://0-doi-org.brum.beds.ac.uk/10.3390/s19122787
Lorenz S, Seidel P, Ghamisi P, Zimmermann R, Tusa L, Khodadadzadeh M, Contreras IC, Gloaguen R. Multi-Sensor Spectral Imaging of Geological Samples: A Data Fusion Approach Using Spatio-Spectral Feature Extraction. Sensors. 2019; 19(12):2787. https://0-doi-org.brum.beds.ac.uk/10.3390/s19122787
Chicago/Turabian StyleLorenz, Sandra, Peter Seidel, Pedram Ghamisi, Robert Zimmermann, Laura Tusa, Mahdi Khodadadzadeh, I. Cecilia Contreras, and Richard Gloaguen. 2019. "Multi-Sensor Spectral Imaging of Geological Samples: A Data Fusion Approach Using Spatio-Spectral Feature Extraction" Sensors 19, no. 12: 2787. https://0-doi-org.brum.beds.ac.uk/10.3390/s19122787